Recently I have been posting about V16 beacons, which are car emergency warning beacons that have been introduced this year in Spain, and which use the LTE NB-IoT cellular network to transmit their geolocation data to the traffic authority network when they are switched on. As part of experimenting with these beacons, I made recording of the downlink and uplink NB-IoT signals while the beacon was sending data to the network. My hope was to be able to decode these signals and extract the two-way traffic that shows how the beacon attaches to the LTE network and sends its data. I already decoded all the uplink transmission in a previous post. In this post I will decode the corresponding recording of the downlink channel.
However, as I already suspected when I was decoding the uplink recording, due to how I physically set up the experiment to avoid saturating the SDR receiver with the beacon transmissions, it turns out that the beacon was talking to an NB-IoT cell that is relatively weak in the downlink recording. More specifically, the antenna for the SDR receiver was set up near a window in the north side of the house, while the beacon was placed on the window sill on the south side of the house. The SDR receiver sees strong downlink signals from cell 145, which is located northeast of the house and is the cell to which the beacon connected in a previous experiment I did with the beacon placed in the north window. However, in this experiment with the beacon on the south window, the beacon connected to cell 261, which is southwest of the house. The signal from this cell is weaker in the downlink recording and is frequently overwhelmed by the signals from cell 145 and other strong cells. So I have had partial success decoding the transmissions that the network sent to the beacon.
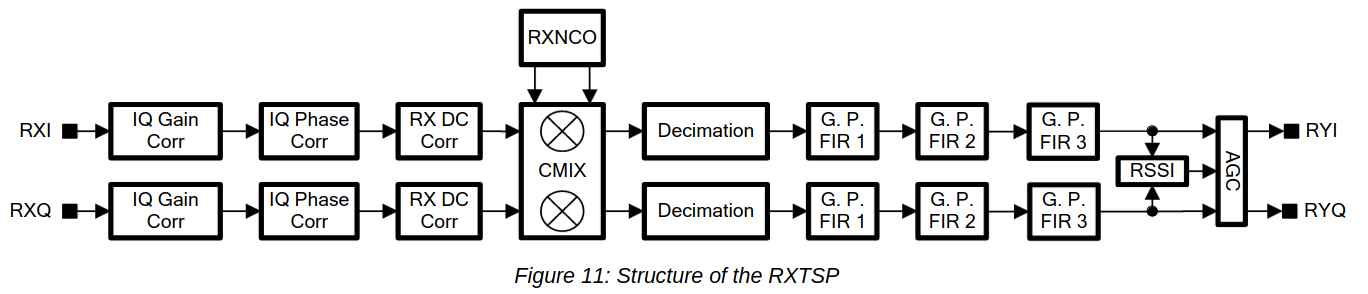
This post is mainly about the NB-IoT downlink in general. At the end I focus on the downlink transmissions to the V16 beacon that I have been able to decode. It is a rather long post, because I cover all the main physical channels and signals of the NB-IoT downlink. I show how the NPSS and NSSS primary and secondary synchronization signals and the NRS reference signals work, how to decode the MIB-NB in the NPBCH, how to decode the SIB1-NB and SI messages carrying other SIB-NBs, how to decode NPDCCH transmissions in the Type1 common search space, which corresponds to paging, as well as decoding the corresponding NPDSCH transmissions carrying paging messages, how to do blind decoding of NPDCCH transmissions in the Type2 common search space and UE-specific search space, which correspond to uplink grants and downlink scheduling, and decode the corresponding NPDSCH transmissions that send data to the V16 beacon.
The recording used in this post is published in the dataset Recording of the NB-IoT downlink of a V16 beacon in Zenodo.