The first Amateur VLBI experiment with DSLWP-B was performed on 2018-06-10. In that experiment, the 250baud GMSK beacons at 435.4MHz and 436.4MHz were recorded in the 25m PI9CAM radiotelescope in Dwingeloo, The Netherlands, and a 12m repurposed Inmarsat C-band dish in Shahe, Beijing. These synchronized recordings were processed later to obtain delta-range and delta-velocity measurements. Due to the low baudrate, the noise of the delta-range measurements was quite high, on the order of 20km. Since the beacons were short transmissions of 15 seconds, making accumulated phase measurements was not possible.
Another Amateur VLBI experiment was performed on 2018-11-21. The novelty of this experiment was that 500baud GMSK SSDV transmissions were made on 436.4MHz. These long transmissions, lasting around 30 minutes each, allow us to make accumulated phase measurements. Also, the higher baudrate reduces the noise in the delta-range measurements. Another novelty was that a third station, the Harbin Institute of Technology Amateur Radio Club BY2HIT groundstation also joined the experiments, so observations from three stations are available.
This post is an account of the results I have obtained processing the observations from 2018-11-21.
A few days ago, I spoke about the future impact of DSLWP-B on the lunar surface, which will happen in the far side of the Moon around the end of July, and how the spacecraft could be manoeuvred to make the impact point fall on the near side of the Moon instead, so that it can be observed from Earth.
Philip Stooke made a very good remark in the comments saying that the impact might have been planned on the far side of the Moon deliberately in order to avoid Apollo landing sites and other heritage sites. This is a very valid concern. By all means, the crash should be planned to avoid disturbing heritage sites or other areas of specific interest.
In my last post, I spoke about the future lunar impact of DSLWP-B on July 31. Edgar Kaiser DF2MZasked over on Twitter if the impact would be visible from Earth. As I didn’t know the answer, I have made a simulation in GMAT to find this out.
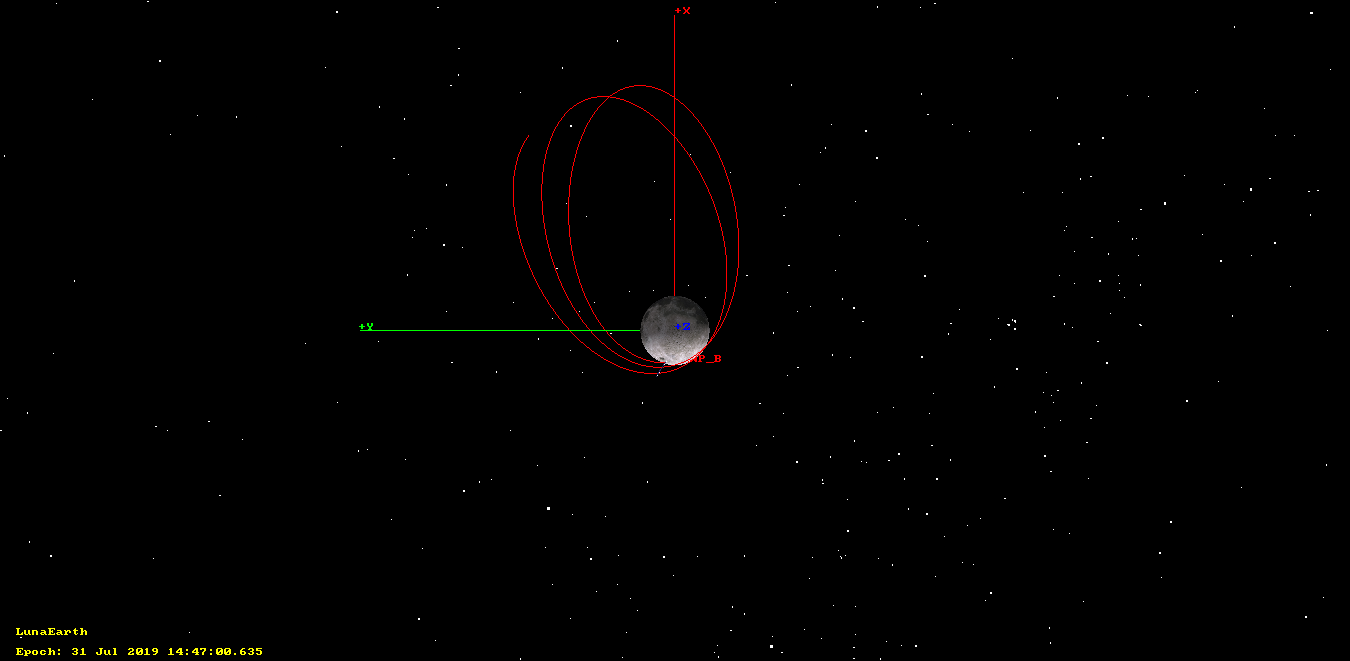
The figure below shows the orbit of DSLWP-B between July 28 12:00 UTC and the moment of impact, on July 13 14:47 UTC. The orbital state used for DSLWP-B is the 20190426 tracking file from dslwp_dev. The reference frame is arranged so that the +X axis points towards the Earth, and the Y axis lies on the Earth-Moon orbital plane. As we can see, unfortunately, the impact will happen on the far side of the Moon, where it is not observable from Earth.
Future impact of DSLWP-B on the far side of the Moon
However, it is possible to arrange a manoeuvre to modify the orbit slightly and make the impact point fall on the near side of the Moon, where it is visible from Earth. In the previous post we observed that, ignoring the collision with the lunar surface, the periapsis radius would continue to decrease after July 31, until reaching a minimum value in January 2020.
Therefore, it is possible to raise the periapsis radius slightly in order to delay the collision approximately half a lunar month, so that the periapsis faces the Earth at the moment of impact. The delta-v required to make this manoeuvre is small, as the adjustment to the orbit is subtle.
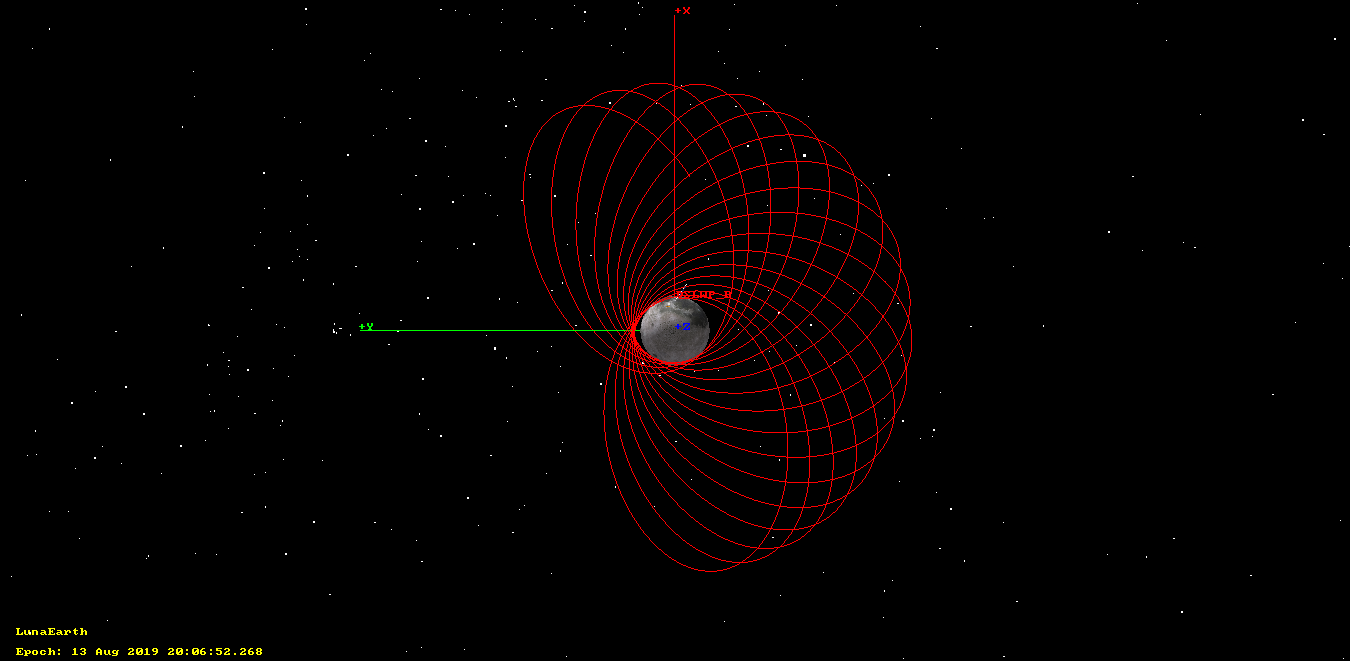
For instance, performing a prograde burn of 7m/s at the first apoapsis after July 1 delays the collision until August 13, producing an impact in the near side of the Moon. The resulting orbit can be seen in the figure below, which shows the path of DSLWP-B between July 28 and the moment of impact.
Impact of DSLWP-B on the near side of the Moon if a correction manoeuvre is applied
Adjusting the delta-v more precisely would make it possible even to control the time of the impact, so as to guarantee that the Moon will be in view of the groundstations at China and The Netherlands when the collision happens. However, this adjustment requires a very precise delta-v and is quite sensitive to the orbital state, so perhaps it is not feasible without performing a precise orbit determination and maybe some smaller correction manoeuvres following the periapsis raise.
Another possible problem that can affect the prediction of the impact point are the perturbations of the orbit caused by the lunar mascons, which can be noticeable when the altitude of the orbit starts getting small, and which haven’t been considered very carefully in this simulation (the non-spherical gravity of the Moon was only simulated up to degree and order 10).
The GMAT script used for this post can be found here.
On January 24, the periapsis of the lunar orbit of DSLWP-B was lowered approximately by 500km, so that orbital perturbations would eventually force the satellite to collide with the Moon. This was done to put an end to the mission and to avoid leaving debris in orbit. It is expected that the collision will happen at the end of July, so there are only three months left now for the DSLWP-B mission. Here I look at the details of the deorbit.
JY1SAT is a Jordanian 1U Amateur cubesat that carries a FUNcube payload by AMSAT-UK. As usual, the FUNcube payload on-board JY1SAT has a linear transponder with uplink in the 435MHz band and downlink in the 145MHz band, and a 1k2 BPSK telemetry transmitter in the 145MHz band. The novelty in comparison to the older FUNcube satellites is that the BPSK transmitter is also used to send SSDV images and Codec2 digital voice data.
Here I show how to decode the SSDV images using gr-satellites.
In February this year, the orientation of the orbit of DSLWP-B around the Moon was such that, when viewed from the Earth, it passed behind the Moon on every orbit. This opened up the possibility for recording the signal of DSLWP-B as it hid behind the Moon, thus blocking the line of sight path. The physical effect that can be observed in such events is that of diffraction. The power of the received signal doesn’t drop down to zero in a brick-wall fashion just after the line of sight is blocked, but rather behaves in an oscillatory fashion, forming the so called diffraction fringes.
The signal from DSLWP-B was observed and recorded at the Dwingeloo 25m radiotelescope for three days in February: 4th, 13th and 15th. During the first two days, an SSDV transmission was commanded several minutes before DSLWP-B hid behind the Moon, so as to guarantee a continuous signal at 436.4MHz to observe the variations in signal power as DSLWP-B went behind the Moon. On the 15th, the occultation was especially brief, lasting only 28 minutes. Thus, DSLWP-B was commanded to transmit continuously before hiding behind the Moon. This enabled us to also observe the end of the occultation, since DSLWP-B continued transmitting when it exited from behind the Moon. This is an analysis of the recordings made at Dwingeloo.
The IARU R1interim meeting is being held in Vienna, Austria, on April 27 and 28. This post is an overview of the proposals that will be presented during this meeting, from the point of view of the usual topics that I treat in this blog.
The proposals can be found in the conference documents. There are a total of 64 documents for the meeting, so a review of all of them or an in-depth read would be a huge work. I have taken a brief look at all the papers and selected those that I think to be more interesting. For these, I do a brief summary and include my technical opinion about them. Hopefully this will be useful to some readers of this blog, and help them spot what documents could be more interesting to read in detail.
The Sprites chipsats are tiny satellites built on a 3.5×3.5cm PCB with the bare minimum electronics to do something useful: a CC430 microcontroller with integrated FSK transceiver, an IMU, and solar cells.
The Sprites have been developed as part of the KickSat project, led by Zac Manchester, from Stanford University. The idea is to carry up to 128 Sprites in a cubesat and deploy them in a swarm once the cubesat is in orbit. The first test of this concept was done by the KickSat 3U cubesat in 2014. The test was a failure, since the Sprites couldn’t be deployed before KickSat reentered.
The second test was made this year with the KickSat-2 3U cubesat, a reflight of the KickSat mission carrying 104 Sprites. KickSat-2 was launched to the ISS onboard Cygnus NG-10 in November 2018 and deployed into orbit in February 2019.
All the Sprites transmit in the same frequency using CDMA, so further analysis is required to identify which Sprites were observed by Dwingeloo. Zac said he was working on decoding the recording, however, I haven’t seen any results published yet. Here I show my analysis of the recording made at Dwingeloo. I manage to detect 4 different Sprites.
This weekend, the beacons of the Es’hail 2 narrowband transponder have undergone maintenance. The beacons have been off for several periods of a few hours on Friday and Saturday. After the maintenance, there are two main changes: the phase noise of the beacons has been fixed, and the beacons are now approximately 3dB stronger.
Since the opening of the transponder on February 14, some phase noise on the two beacon signals was appreciable slightly above the noise floor, and with the latest increase in power of the beacons, the phase noise was more evident. Now the problem is fixed and the transponder is clear of phase noise.
The figure below shows the power of the beacons and transponder noise (measured in 2kHz bandwidth). You can see that the beacon power has daily fluctuations of up to 2dB, but despite of this fact it is clear that the beacons are now approximately 3dB stronger than before (maybe even 4dB).
The figure below shows the CN0 of the beacons, measured both at the transponder and at my receiver (where it is lower due to system noise). The CN0 is now extremely high: 56dB for the BPSK beacon. In a previous post I thought about what could be done with 45dB of CN0. The conclusion was that if you want to fit a digital signal in an SSB channel bandwidth, you are much more bandwidth-limited than SNR-limited. This is now even more true.
With the increased beacon power, it should be fairly easy to decode the beacons with a bare LNB, even despite the fact that the transponder gain has been reduced twice. Also, now that the SNR of the beacons is so high, there is no excuse for being louder than the beacon. Anyone who is stronger than the beacon is most likely using too much power. Their mode of choice probably works equally well with several dB less of SNR.
Continuing with my frequency measurements of Es’hail 2, I have now been measuring the frequency of the beacons of the QO-100 narrowband transponder for several days. The main goal of these frequency measurements is to use Doppler to study the orbit of Es’hail 2. Previously, I had been doing frequency measurements on the engineering beacons at 10706MHz and 11205MHz. However, these beacons are currently being transmitted on a MENA beam, so I’m quite lucky to be in Spain, as they can’t be received in many other parts of Europe.
During the in-orbit tests of Es’hail 2, the engineering beacons were transmitted on a global beam, and I performed some differential Doppler studies with Jean Marc Momple 3B8DU, in Mauritius. The engineering beacons are no longer any good for these kind of studies, since their area of coverage is small. Thus, I have started to measure the beacons in the narrowband transponder, which covers all the satellite footprint.