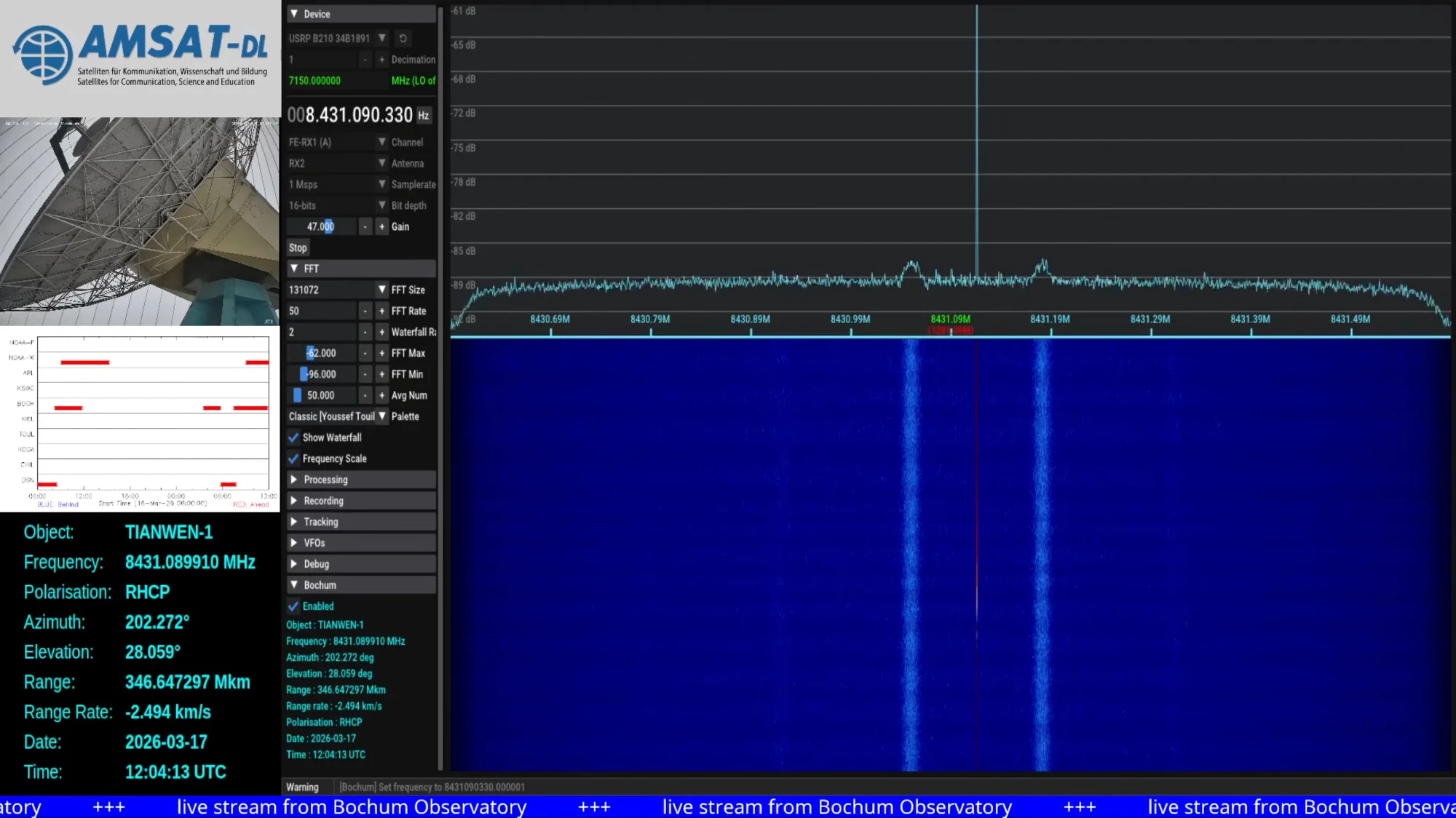
The signal strength looks completely normal, as evidenced by the spectrum plot shared in the announcement.
Screenshot of Tianwen-1 reception in Bochum shared by AMSAT-DL
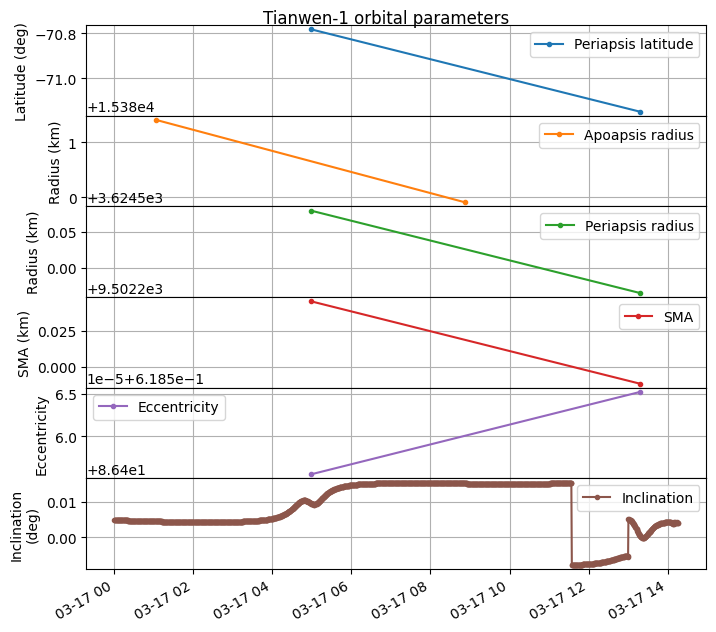
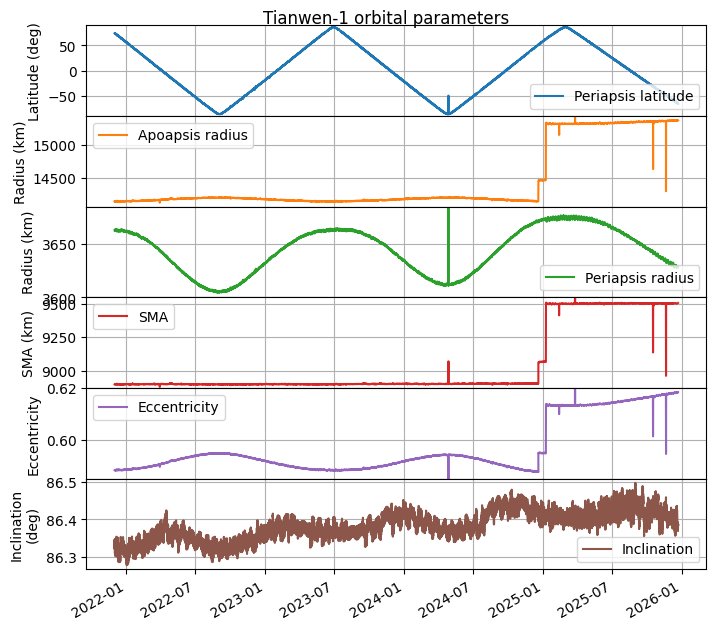
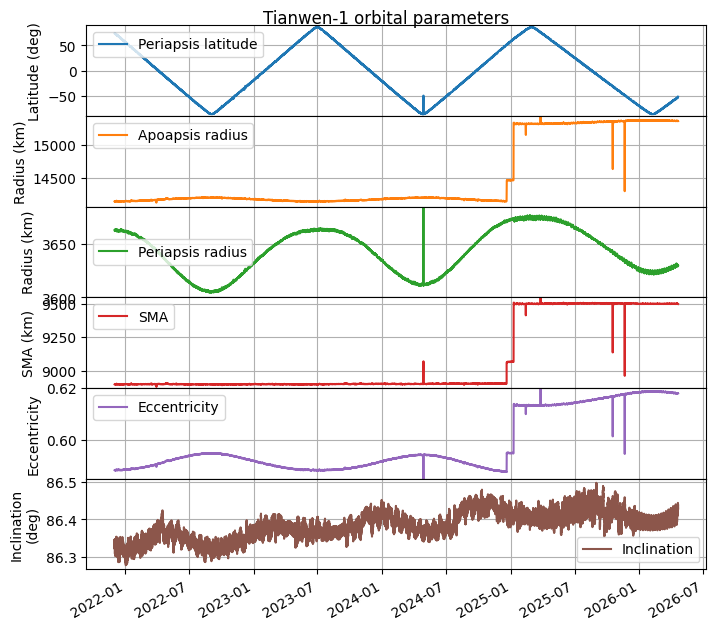
Telemetry containing state vectors was decoded between 2026-03-17 11:34 and 14:16 UTC. I have updated my plot of orbital parameters to include this new information. The period between 2025-12-23 and 2026-03-17 corresponds to a propagation with GMAT of the last telemetry received in 2025. The end of the plot corresponds to the telemetry received in 2026-03-17.
We can see that the orbit has remained the same, and there have been no manoeuvres during this period. A zoomed in version to the end of the plot shows that there is basically no jump in the orbital parameters. There is a tiny jump in the inclination as the new telemetry is received, but that is all.
So far the reasons why Tianwen-1 has apparently not transmitted telemetry to Earth for almost 3 months remain unknown.
Yesterday, AMSAT-DLpublished the news that they have been unable to receive any signals from Tianwen-1 with the 20 m antenna in Bochum since 2025-12-23. As you may know if you have been following my posts about Tianwen-1, AMSAT-DL has been using this antenna to receive and decode telemetry from Tianwen-1 almost every day since the beginning of the mission in 2020-07-23. The news about the lack of signal detected from Tianwen-1 over the last few months were hardly a secret, because AMSAT-DL runs a livestream of the signals received with the Bochum antenna 24/7, so anyone could look at the livestream and realize that Tianwen-1 was being observed but no signal was visible on the spectrum. However, now that the public has been made well aware of this fact, I can make some more comments about it. There has been no public communication from the Chinese space program regarding this, so the fate of Tianwen-1 is currently unknown.
During December 2025 and January 2026, there was a Mars conjunction, which means that Mars goes behind the Sun as seen from Earth. Communications with Mars orbiters cannot happen during this period of time. For instance, this news piece hints at NASA Mars missions not having contact between 2025-12-29 and 2026-01-16, which corresponds to a Sun-Earth-Mars angle (elongation) of 3º on 2025-12-29 and 1.8º on 2026-01-16, with the minimum elongation achieved on 2026-01-09. Therefore, it was completely expected that we would lose Tianwen-1’s signal during the conjunction period. Because the communications link to Earth does not work, spacecraft will usually not point their high gain antennas to Earth and even stop transmitting during this period. However, we expected to see Tianwen-1 back again after the conjunction, and we never did.
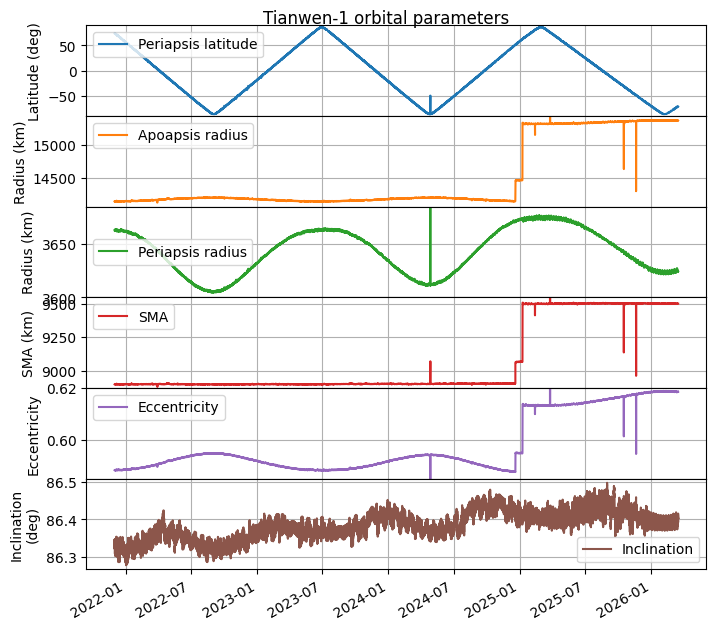
I have been using the telemetry decoded by AMSAT-DL, which includes the spacecraft state vectors, to keep track of the spacecraft orbit. I have been posting updates about any change that happens. The last one was the apoapsis raise on 2025-01-08. The lack of signals from Tianwen-1 sparked internal discussion about whether the spacecraft might have intentionally reentered some time around the conjunction period as a way of terminating the mission without leaving orbital debris. To analyse whether this could be possible, I have updated my orbit analysis to account for all the telemetry that has been received so far, up to 2025-12-22, which is when the last telemetry was decoded.
The result can be seen in the figure below. We see the apoapsis raises that happened during the end of 2024 and beginning of 2025. After that there have been no manoeuvres.
Since the plot above indicates that the periapsis radius would be going towards a minimum at the beginning of 2026 due to long-term periodic orbit perturbations, I propagated the last telemetry data we have forward with the goal of studying the impact of the larger apoapsis radius. The results are shown here. We note that the apoapsis radius minimum is now much higher than in the past, so the hypothesis of a reentry is unlikely unless a manoeuvre that we didn’t see in the telemetry has happened.
Today marks 10 years since I wrote the first post in this blog. It was a very basic and brief post about me decoding the European FreeDV net over a WebSDR. I mainly wrote it as a way of getting the ball rolling when I decided to start a blog back in October 2015. Over the 10 years that I have been blogging, the style, topics, length and depth of the posts have kept shifting gradually. This is no surprise, because the contents of this blog are a reflection of my interests and the work I am doing that I can share freely (usually open source work).
Since I started the blog, I have tried to publish at least one post every month, and I have managed. Sometimes I have forced myself to write something just to be up to the mark, but more often than not the posts have been something I really wanted to write down and release to the world regardless of a monthly tally. I plan to continue blogging in the same way, and no doubt that the contents will keep evolving over time, as we all evolve as persons during our lifetime. Who knows what the future will bring.
I wanted to celebrate this occasion by making a summary of the highlights throughout these 10 years. I have written 534 posts, and although Google search is often useful at finding things, for new readers that arrive to this blog it might be difficult to get a good idea of what kind of content can be found here. This summary will be useful to expose old content that can be of interest, as well as serve me to reflect on what I have been writing about.
On March 22, CAMRAS performed a Venus radar experiment (or Earth-Venus-Earth bounce, as it is more commonly known in Amateur radio) in collaboration with Astropeiler Stockert, the Deep Space Exploration Society, and the Open Research Institute. The experiment was done in L-band, at 1299.5 MHz, using the 25 m Dwingeloo radiotelescope as transmitter and receiver and the Stockert 25 m telescope as a receiver. The experiment was done during the Venus conjunction, as this minimizes the distance between the Earth and Venus. The round-trip time to Venus was approximately 280 seconds. The radar waveform was a CW carrier with a duration of 278 seconds. It was transmitted a total of 4 times every 600 seconds. Thus each period was composed by:
278 second transmission
~2 second TX/RX guard time
278 second echo reception
~42 second wait
More transmissions were planned, including some spread-spectrum signals designed by the Open Research Institute. However, the transmitter started failing and they had to stop.
Update 2025-04-21: I have been informed that the spread-spectrum signal for this experiment was designed by CAMRAS. The waveform that the Open Research Institute is designing will potentially be used in future experiments.
In this post I will do my own analysis of the experiment. The goal is not to confirm the successful detection with an independent analysis, since I believe that the analysis published by CAMRAS is correct and leaves no doubt about this. It is to expand this analysis and to touch on other topics that this analysis has not covered:
Calculation of the Doppler. CAMRAS has published CSV files containing the expected Doppler at each receiver, but they have not published the code to calculate this. Here I will do all the relevant calculations with SPICE.
Doppler correction with the gr-satellites Doppler correction block, which performs linear interpolation of the Doppler frequency to calculate the frequency shift applied to each sample.
High-quality spectral analysis with a polyphase filterbank.
Try to estimate the Doppler spread and compare with some results in the literature.
On Sunday March 2, Firefly Aerospace’s Blue Ghost Mission 1 successfully landed on Mare Crisium, becoming the first NASA CLPS mission to perform a fully successful lunar landing. Congratulations to all the team at Firefly for this huge achievement.
In this post I do a quick analysis of the Doppler of the signal received at Bochum and Dwingeloo. Part of the goal of this is to try to answer a question of Jonathan McDowell, who asked if it was possible to determine the exact second of the touchdown from this data. The answer is that this is probably not possible, since for a soft touchdown there is no significant acceleration at touchdown that can be identified in the Doppler curve.
The raw IQ data recorded by AMSAT-DL is not publicly available. The data recorded by CAMRAS can be found here.
Some weeks ago I reported about an apoapsis raise manoeuvre done by Tianwen-1, the Chinese Mars orbiter. This has now happened again. Using state vectors from the telemetry decoded with the 20 m antenna in Bochum observatory by AMSAT-DL, we have detected an apoapsis raise manoeuvre done on 2025-01-08. This new apoapsis raise is much larger than the previous one. I have done the same kind of calculations as in the previous post, and also corrected a bug in my Keplerian elements plots (the periapsis and apoapsis passings were being paired incorrectly, which caused the SMA and eccentricity not to change in the plots I did in the previous post).
For a long time, AMSAT-DL has been using the 20 meter antenna in Bochum observatory to receive some telemetry from Tianwen-1, the Chinese Mars orbiter, almost daily. Since the telemetry includes the spacecraft’s state vectors, we can use this to monitor the spacecraft’s orbit. In 8 November 2021, Tianwen-1 entered its remote sensing orbit. This is an elliptical orbit with a period approximately 2/7 Mars sidereal days plus 170 seconds. This causes a ground track that is almost repeating, but drifts slowly to cover all the surface area of the planet.
I have been posting yearly updates about Tianwen-1’s orbit, the last of them this summer. In these updates, we can see that no manoeuvres have happened, and the changes in the Keplerian elements correspond to orbital perturbations caused by external forces. The orbit is in fact designed to cause the latitude of the periapsis to precess. In this way, all the surface of Mars can be scanned from low altitude.
Now we have some news. In the telemetry of the last few days we have detected that Tianwen-1 has raised its apoapsis radius from about 14134 km to 14489 km. All the data we have indicates that a propulsive burn has happened recently. In this post I give the details about this apoapsis raise manoeuvre.
This year I submitted a track of challenges called “Not-LoRa” to the GRCon 2024 Capture The Flag. The idea driving this challenge was to take some analog voice signals and apply chirp spread spectrum modulation to them. Solving the challenge would require the participants to identify the chirp parameters and dechirp the signal. This idea also provided the possibility of hiding weak signals that are below the noise floor until they are dechirped, which is a good way to add harder flags. This blog post is an in-depth explanation of the challenge. I have put the materials for this challenge in this Github repository.
To give participants a context they might already be familiar with, I took the chirp spread spectrum parameters from several common LoRa modulations. These ended up being 125 kHz SF9, SF11 and SF7. LoRa is somewhat popular within the open source SDR community, and often there are LoRa challenges or talks in GRCon. This year was no exception, with a Meshtastic packet in the Signal Identification 7 challenge, and talks about gr-lora_sdr and Meshtastic_SDR.
LEV-1 is a small lunar hopper that was carried by the SLIM lunar lander. It was released a few metres above the surface on January 19, as part of the lunar landing of SLIM. LEV-1 transmits telemetry in the 435 MHz amateur satellite band (it has an IARU satellite coordination approval), and also in S-band. Shortly after the landing, CAMRASreceived the 437.410 MHz signal from LEV-1 using the 25 m radiotelescope at Dwingeloo. They have published a couple of IQ recordings in their directory of miscellaneous recordings (see the filenames starting by slim_).
The information about the telemetry signal of LEV-1 is scarce. Its website just says
Telemetry format of LEV-1 stands on CCSDS. The contents of telemetry are under developing.
The IARU coordination sheet contains other clues, such as the mention of PCM/PSK/PM, CW, and bitrates of 31, 31.25 and 32 bps, but not much else. Regardless of the mention of CCSDS, I have found that the signal from LEV-1 is quite peculiar. This post is an account of my attempt to decode the data.
These tutorials are intended as an introduction to GNU Radio and SDR in general, focusing on topics and techniques that are related or applicable to SETI and radio astronomy. They don’t assume much previous background, so they can also be useful for GNU Radio beginners outside of SETI. Although each tutorial builds up on concepts introduced in previous tutorials, their topics are reasonably independent, so if you have some background in SDR you can watch them in any order.
All the GNU Radio flowgraphs and other materials that I used are available in the daniestevez/reu-2023 Github repository. Below is a short summary of each of the tutorials.