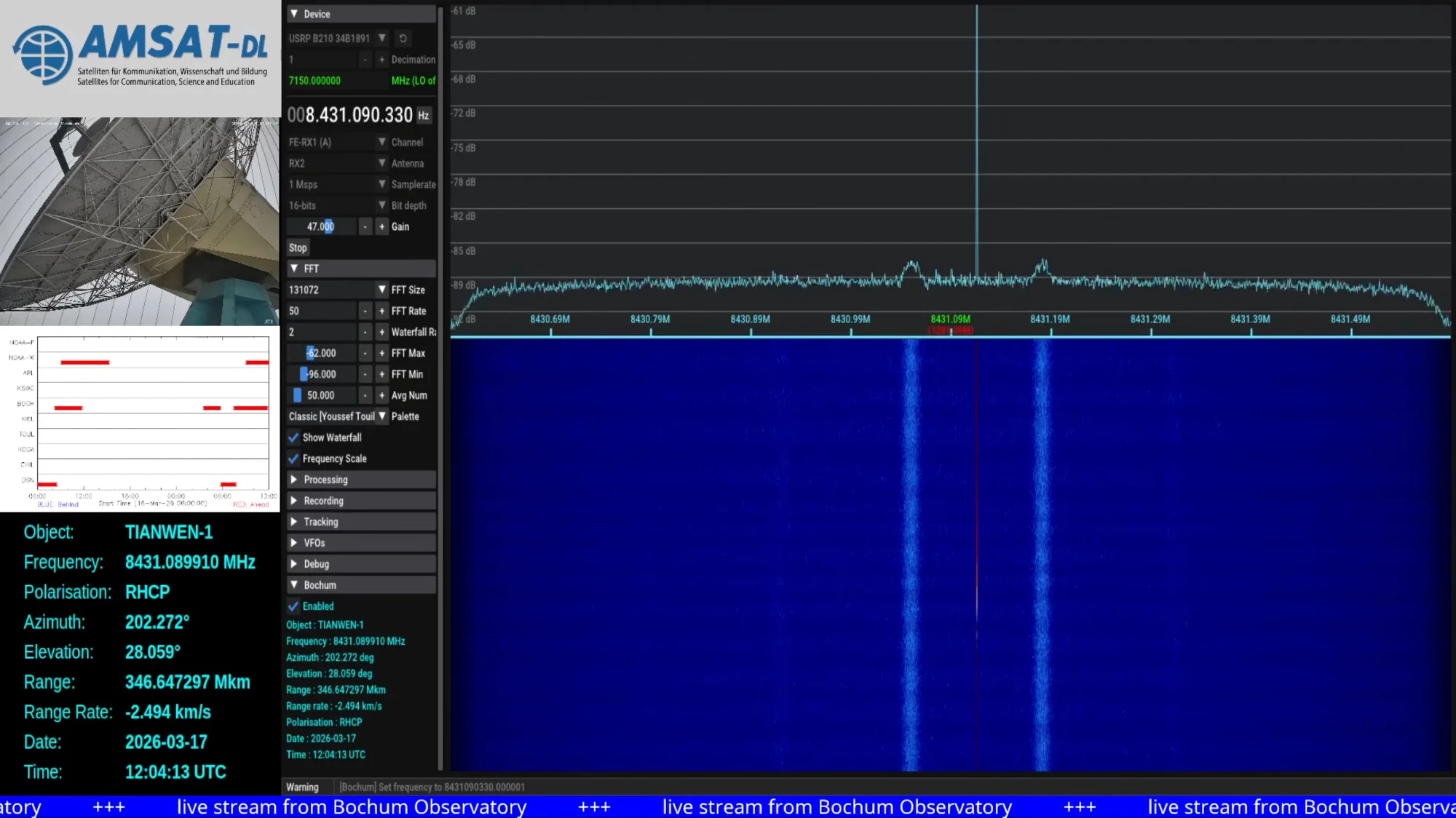
The signal strength looks completely normal, as evidenced by the spectrum plot shared in the announcement.
Screenshot of Tianwen-1 reception in Bochum shared by AMSAT-DL
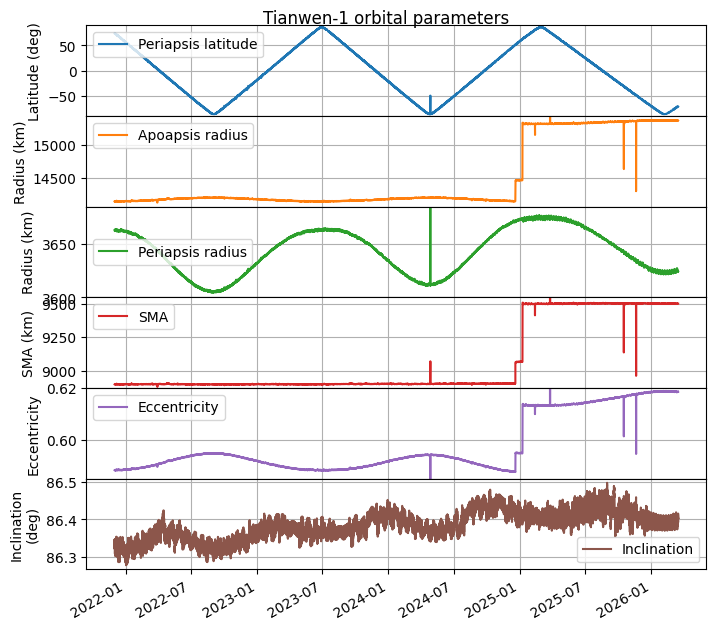
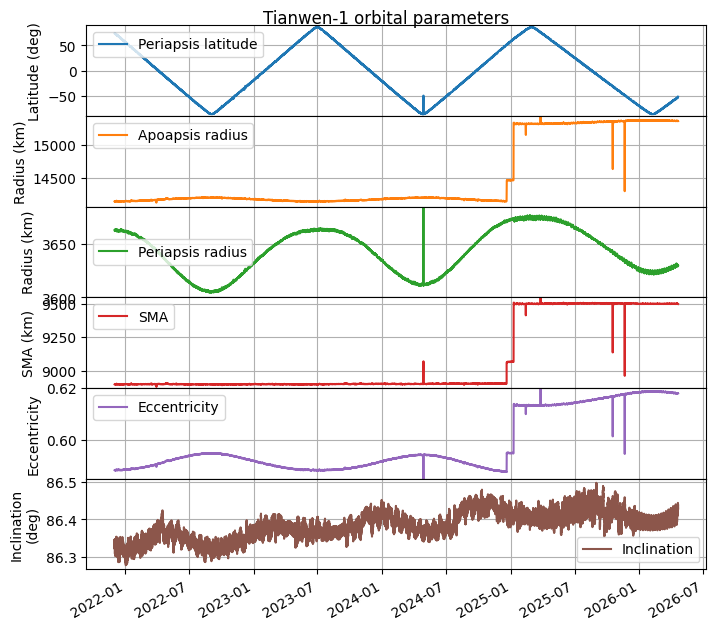
Telemetry containing state vectors was decoded between 2026-03-17 11:34 and 14:16 UTC. I have updated my plot of orbital parameters to include this new information. The period between 2025-12-23 and 2026-03-17 corresponds to a propagation with GMAT of the last telemetry received in 2025. The end of the plot corresponds to the telemetry received in 2026-03-17.
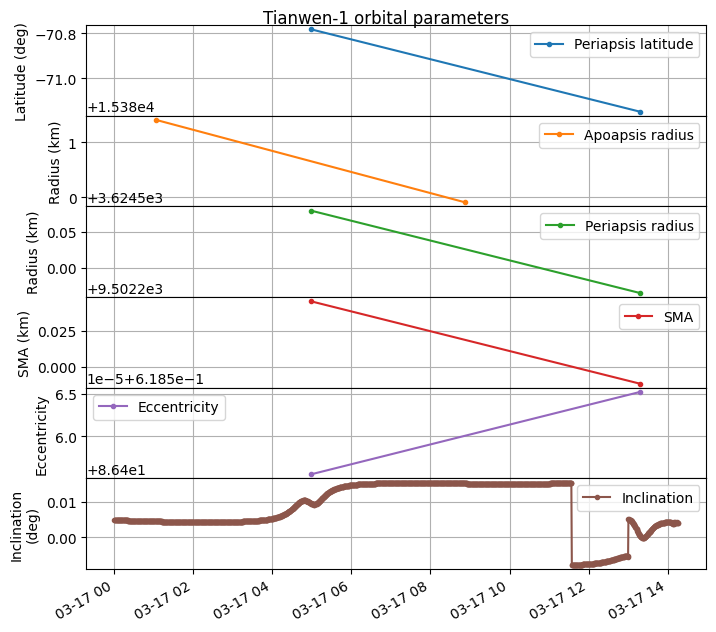
We can see that the orbit has remained the same, and there have been no manoeuvres during this period. A zoomed in version to the end of the plot shows that there is basically no jump in the orbital parameters. There is a tiny jump in the inclination as the new telemetry is received, but that is all.
So far the reasons why Tianwen-1 has apparently not transmitted telemetry to Earth for almost 3 months remain unknown.
Yesterday, AMSAT-DLpublished the news that they have been unable to receive any signals from Tianwen-1 with the 20 m antenna in Bochum since 2025-12-23. As you may know if you have been following my posts about Tianwen-1, AMSAT-DL has been using this antenna to receive and decode telemetry from Tianwen-1 almost every day since the beginning of the mission in 2020-07-23. The news about the lack of signal detected from Tianwen-1 over the last few months were hardly a secret, because AMSAT-DL runs a livestream of the signals received with the Bochum antenna 24/7, so anyone could look at the livestream and realize that Tianwen-1 was being observed but no signal was visible on the spectrum. However, now that the public has been made well aware of this fact, I can make some more comments about it. There has been no public communication from the Chinese space program regarding this, so the fate of Tianwen-1 is currently unknown.
During December 2025 and January 2026, there was a Mars conjunction, which means that Mars goes behind the Sun as seen from Earth. Communications with Mars orbiters cannot happen during this period of time. For instance, this news piece hints at NASA Mars missions not having contact between 2025-12-29 and 2026-01-16, which corresponds to a Sun-Earth-Mars angle (elongation) of 3º on 2025-12-29 and 1.8º on 2026-01-16, with the minimum elongation achieved on 2026-01-09. Therefore, it was completely expected that we would lose Tianwen-1’s signal during the conjunction period. Because the communications link to Earth does not work, spacecraft will usually not point their high gain antennas to Earth and even stop transmitting during this period. However, we expected to see Tianwen-1 back again after the conjunction, and we never did.
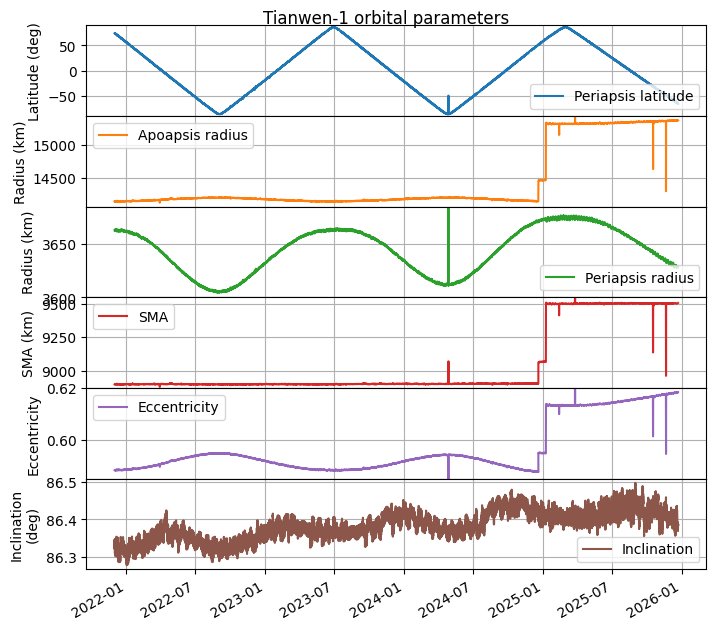
I have been using the telemetry decoded by AMSAT-DL, which includes the spacecraft state vectors, to keep track of the spacecraft orbit. I have been posting updates about any change that happens. The last one was the apoapsis raise on 2025-01-08. The lack of signals from Tianwen-1 sparked internal discussion about whether the spacecraft might have intentionally reentered some time around the conjunction period as a way of terminating the mission without leaving orbital debris. To analyse whether this could be possible, I have updated my orbit analysis to account for all the telemetry that has been received so far, up to 2025-12-22, which is when the last telemetry was decoded.
The result can be seen in the figure below. We see the apoapsis raises that happened during the end of 2024 and beginning of 2025. After that there have been no manoeuvres.
Since the plot above indicates that the periapsis radius would be going towards a minimum at the beginning of 2026 due to long-term periodic orbit perturbations, I propagated the last telemetry data we have forward with the goal of studying the impact of the larger apoapsis radius. The results are shown here. We note that the apoapsis radius minimum is now much higher than in the past, so the hypothesis of a reentry is unlikely unless a manoeuvre that we didn’t see in the telemetry has happened.
Some weeks ago I reported about an apoapsis raise manoeuvre done by Tianwen-1, the Chinese Mars orbiter. This has now happened again. Using state vectors from the telemetry decoded with the 20 m antenna in Bochum observatory by AMSAT-DL, we have detected an apoapsis raise manoeuvre done on 2025-01-08. This new apoapsis raise is much larger than the previous one. I have done the same kind of calculations as in the previous post, and also corrected a bug in my Keplerian elements plots (the periapsis and apoapsis passings were being paired incorrectly, which caused the SMA and eccentricity not to change in the plots I did in the previous post).
For a long time, AMSAT-DL has been using the 20 meter antenna in Bochum observatory to receive some telemetry from Tianwen-1, the Chinese Mars orbiter, almost daily. Since the telemetry includes the spacecraft’s state vectors, we can use this to monitor the spacecraft’s orbit. In 8 November 2021, Tianwen-1 entered its remote sensing orbit. This is an elliptical orbit with a period approximately 2/7 Mars sidereal days plus 170 seconds. This causes a ground track that is almost repeating, but drifts slowly to cover all the surface area of the planet.
I have been posting yearly updates about Tianwen-1’s orbit, the last of them this summer. In these updates, we can see that no manoeuvres have happened, and the changes in the Keplerian elements correspond to orbital perturbations caused by external forces. The orbit is in fact designed to cause the latitude of the periapsis to precess. In this way, all the surface of Mars can be scanned from low altitude.
Now we have some news. In the telemetry of the last few days we have detected that Tianwen-1 has raised its apoapsis radius from about 14134 km to 14489 km. All the data we have indicates that a propulsive burn has happened recently. In this post I give the details about this apoapsis raise manoeuvre.
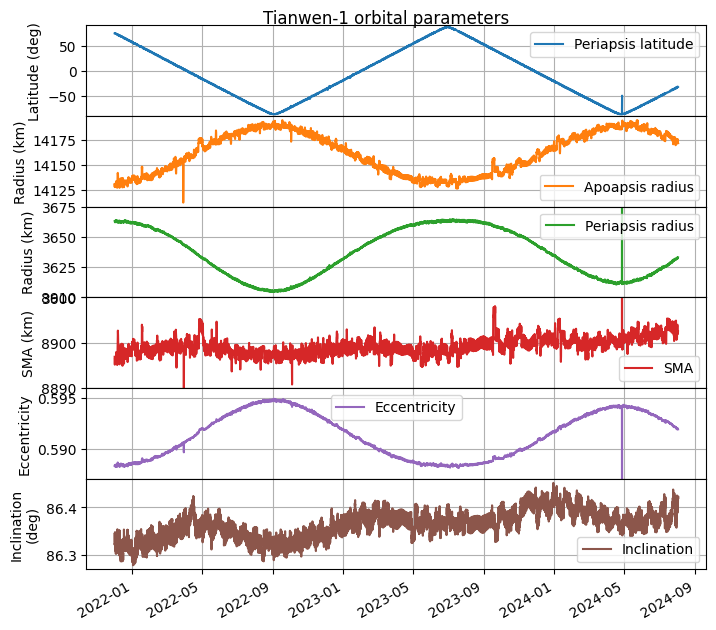
Last year I wrote a post on July 23, which is the anniversary of Tiawen-1‘s launch. The post was essentially an updated plot of the orbital parameters of Tianwen-1’s remote sensing orbit. As I explained in that post, AMSAT-DL is using the 20 meter antenna in Bochum observatory to receive telemetry from Tianwen-1 almost every day (this can be followed in the YouTube livestream). Since Tianwen-1 includes its state vector (position and velocity with respect to Mars) in its telemetry, this allows us to monitor its orbit, which is of interest because no other public detailed information is available.
This year I completely forgot to do the same again for July 23, but I have remembered now. Here is the updated plot of the orbital parameters of Tianwen-1 since 8 November 2021, when the remote sensing orbit began. The plot includes data until 2 August 2024. During most of August, AMSAT-DL is not tracking Tianwen-1, since Mars has a very similar right ascension to STEREO-A, and tracking STEREO-A has priority. Tracking of Tianwen-1 will resume as the two objects drift apart in right ascension.
All the changes in the orbital parameters are due to perturbations by the Sun’s gravity and the oblateness of Mars, since as far as I know there have been no manoeuvres in this orbit. The main change in orbital parameters is a steady change in the latitude of the periapsis. The orbit is designed on purpose to exploit this effect. Over time, all the surface of Mars can be observed from a low altitude. This perturbation is related to a change in eccentricity, which is minimal when the periapsis is over the north pole and maximal when the periapsis is over the south pole.
Now it is quite apparent that there is also a slow but steady increase in inclination. This was not so evident last year, due to a sinusoidal perturbation that is also present, but now it is clear that the inclination has increased by about 0.05 deg since November 2021. It seems that this increase in inclination is related to a small increase in the semi-major axis.
Today is the third anniversary of Tianwen-1, which was launched in 23 July 2020. During the first year of the mission I was tracking it with great detail and writing a lot of posts. A fundamental part of this work was the help of AMSAT-DL. Using its 20 metre antenna in Bochum, they tracked the spacecraft, decoded telemetry and provided live coverage of many of the key mission events in their Youtube livestream. At some point the reception of Tianwen-1’s telemetry at Bochum got completely automated, as we described in a paper in the GNU Radio Conference 2021 proceedings.
To this date, the reception continues in Bochum almost every day, when the dish is not busy with other tasks such as tracking STEREO-A. This means that we get good coverage of the spacecraft orbital data, via the state vectors transmitted in its telemetry.
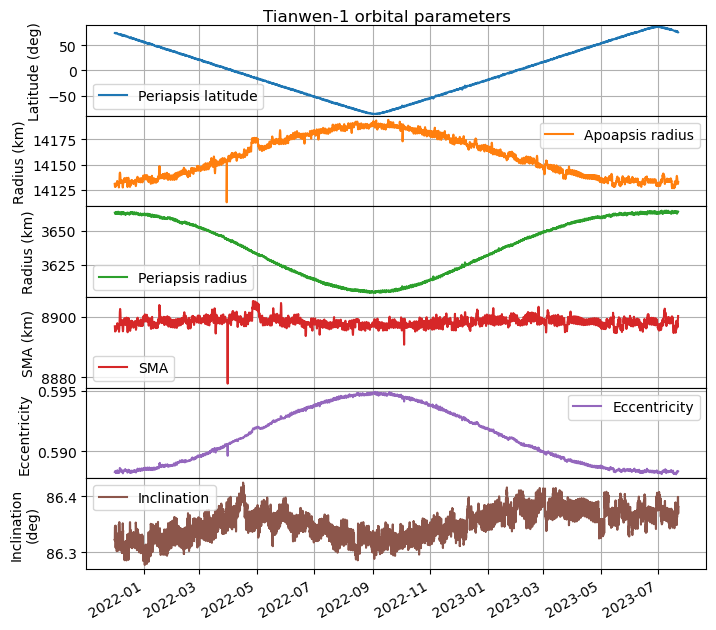
To celebrate the anniversary, I have updated my plot of the orbital parameters, which I made back in March 2022. The plot covers all the remote sensing orbit, from when it started on 8 November 2021, until the present day. To my knowledge, no manoeuvres have happened in this time (perhaps small station-keeping burns would be unnoticed without more careful analysis), so the changes in the orbit are just due to perturbations by forces such as the Sun’s gravity and the oblateness of Mars.
The updated plot can be seen below. We see that the periapsis latitude changes at a steady rate of 0.598 deg/day. The remote sensing orbit was designed so that the periapsis precessed in this way, which allows the spacecraft to cover all the surface of Mars from a low altitude in 301 days. The surface has now been covered twice, since the periapsis has moved from near the north pole to the south pole and back again to the north pole.
There is also an interesting change in eccentricity, which seems to be correlated with the latitude of the periapsis. The eccentricity is largest when the periapsis is over the south pole. In this case, the altitude of the periapsis decreases by 60 km, compared to when the periapsis is over the north pole. The inclination has remained mostly steady, although there seems to be a small perturbation with an amplitude of 0.1 deg.
The updated Jupyter notebook in which this plot was made can be found here.
Tianwen-1, the Chinese Mars orbiter, entered its remote sensing orbit on November 8 2021. In a previous post, I gave an overview of the orbit using one month of state vector data collected from the spacecraft’s telemetry by AMSAT-DL using the 20 m antenna at Bochum observatory. AMSAT-DL has continued receiving telemetry almost every day, so in this post we can now look at nearly 4 months of data for the remote sensing orbit.
This orbit is a polar elliptical orbit with 86 deg inclination, a periapsis altitude of 275 km and an apoapsis radius of 14140 km. The orbital period is approximately 2/7 Mars sidereal days plus 170 seconds. This makes the ground track drift slowly towards the west, allowing the spacecraft to scan all the planet’s surface. Additionally, due to orbit perturbations, the argument of periapsis (and hence its latitude) keeps slowly changing with time. This makes possible to scan all of Mars from a low altitude.
In a previous post, I described the remote sensing orbit into which Tianwen-1 had moved on November 8. Now it has been in this orbit for more than one month, and AMSAT-DL has been collecting telemetry almost daily with the 20 metre antenna at Bochum obseratory. Therefore, it is a good moment to review the state vector data and look at how the orbit has evolved with time.
On November 8, the Tianwen-1 orbiter made a manoeuvre to move itself to the remote sensing orbit, as reported by Chinese media. This orbit is the final orbit in the mission, as depicted in this figure from Wikipedia. The main goal of this orbit is to study the geophysical properties of Mars with all the orbiter instruments (see this paper) and to continue acting as a communications relay for the rover Zhurong.
As usual, AMSAT-DL has been collecting telemetry from Tianwen-1 with the 20 metre antenna at Bochum observatory, including spacecraft state vectors. This allows us to study the orbit change manoeuvre and the properties of the remote sensing orbit. This post is a first look at the state vector data.
As you may have seen in my last post, lately I have been reviewing some of data we have from Tianwen-1. In the days following the landing of Zhurong, back in May, we had so much data in our hands that I couldn’t post about it in a timely manner. We were wondering if we could use this data to plan for a number of experiments with the 20 meter antenna at Bochum observatory. These included trying to receive data from the rover relayed by the orbiter, and trying to detect the rover’s direct X-band link to Earth. We didn’t manage to do any of these, unfortunately, as they had a great deal of luck involved.
During the summer I’ve been involved in several activities such as collaborating with the SETI Institute and BSRC REU summer student programmes by teaching some GNU Radio lessons, and preparing material for GRCon21 (a talk, a workshop and paper). Now I have more time at hand, so it’s good to revisit this data. In this post I’ll look at Tianwen-1’s orbit after the release of the lander.
{kind=link}