STEREO-A is a NASA solar observation spacecraft that was launched in 2006 to a heliocentric orbit with a radius of about 1 au. One of the instruments, called SECCHI, takes images of the Sun using different telescopes and coronagraphs to study coronal mass ejections. Near real-time images of this instrument can be seen in this webpage. These images are certainly the most eye-catching data transmitted by STEREO-A in its X-band space weather beacon.
In September 2022, Wei Mingchuan BG2BHC made some recordings of the space weather beacon using a 13 meter antenna in Harbin Institute of Technology. I wrote a blog post showing a GNU Radio decoder and a Jupyter notebook analysing the decoded frames. I managed to figure out that some of the data corresponded to the S/WAVES instrument, which is an electric field sensor with a spectrometer covering 125 kHz to 16 MHz.
During this summer, STEREO-A is very close to Earth for the first time since it was launched. This has enabled amateur observers with small stations to receive and decode the space weather beacon. As part of these activities, Alan Antoine F4LAU and Scott Tilley VE7TIL have figured out how to decode the SECCHI images. Scott has published a summary of this in his blog, and Alan has added a decoding pipeline to SatDump. Using this information, I have now extended my Jupyter notebook to decode the SECCHI images. Eventually I want to turn this into a GNU Radio demo, and the Jupyter notebook serves as reference code.
Bill Gray, from Project Pluto is doing a great job trying to estimate the orbit of Chang’e 5 as it travels to somewhere around the Sun-Earth L1 Lagrange point (see my previous post). He is using RF pointing data from Amateur observers and the Allen Telescope Array, since the low elongation and the distance of the spacecraft have made it impossible to observe it optically.
For this task, the pointing data I am obtaining with my observations on Allen Telescope Array as part of the activities of the GNU Radio community there is quite valuable, since the 6.1 metre dishes give more accurate pointing measurements than the smaller dishes of Amateurs. The pointing data from ATA should be accurate to within 0.1 or 0.2 degrees.
To try to get more accurate data for Bill, last weekend I decided to do a recording with two dishes from the array, with the goal of using interferometry to obtain a much more precise pointing solution that what can be achieved with a single dish. This post is a report of the processing of the interferometric data.
Back in August, I posted about my calculations of the site where DSLWP-B impacted with the lunar surface on July 31. The goal was to pass the results of these calculations to the Lunar Reconnaissance Orbiter Camera team so that they could image the location and try to find the impact crater.
Yesterday, the LROC team published a post saying that they had been able to find the crash site in an image taken by the LRO NAC camera on October 5. The impact crater is only 328 metres away from the location I had estimated.
This is amazing, as in some way it represents the definitive end of the DSLWP-B mission (besides all the science data we still need to process) and it validates the accuracy of the calculations we did to locate the crash site. I feel that I should give due credit to all the people involved in the location of the impact.
Wei Mingchuan BG2BHC from Harbin Institute of Technology was the first to take the orbital information from the Chinese Deep Space Network, perform orbit propagation and compute the crash location assuming a spherical Moon, thus obtaining an approximate position in Van Gent X crater. Cees Bassa from ASTRON refined Wei’s calculations by including a digital elevation model. Phil Stooke from Western University first suggested to use a digital elevation model, helped us contact the LROC team, and filled in an observation request for the camera. And of course the LROC team and the Chinese DSN, since the quality of their ephemeris for DSLWP-B allowed us to make a rather precise estimate.
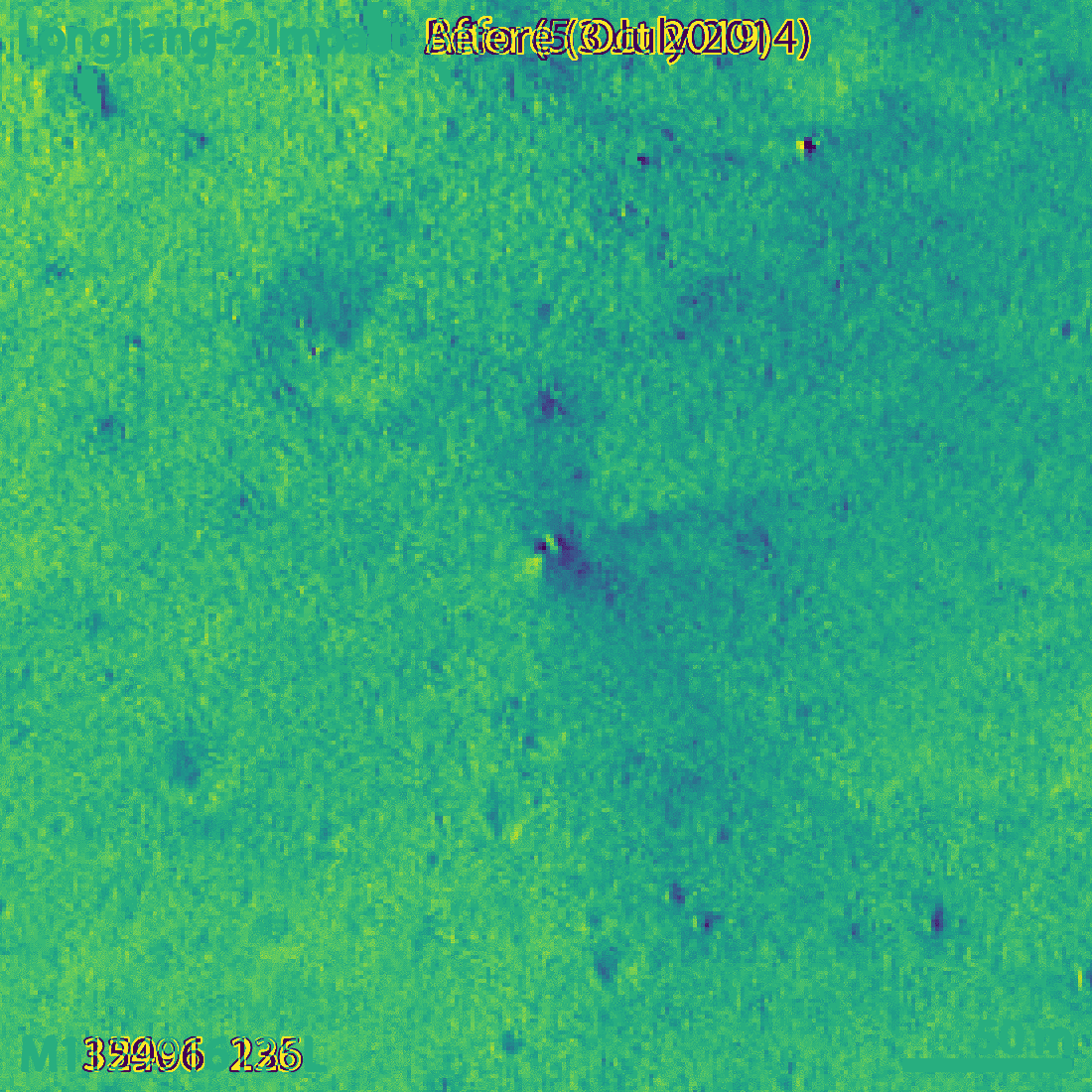
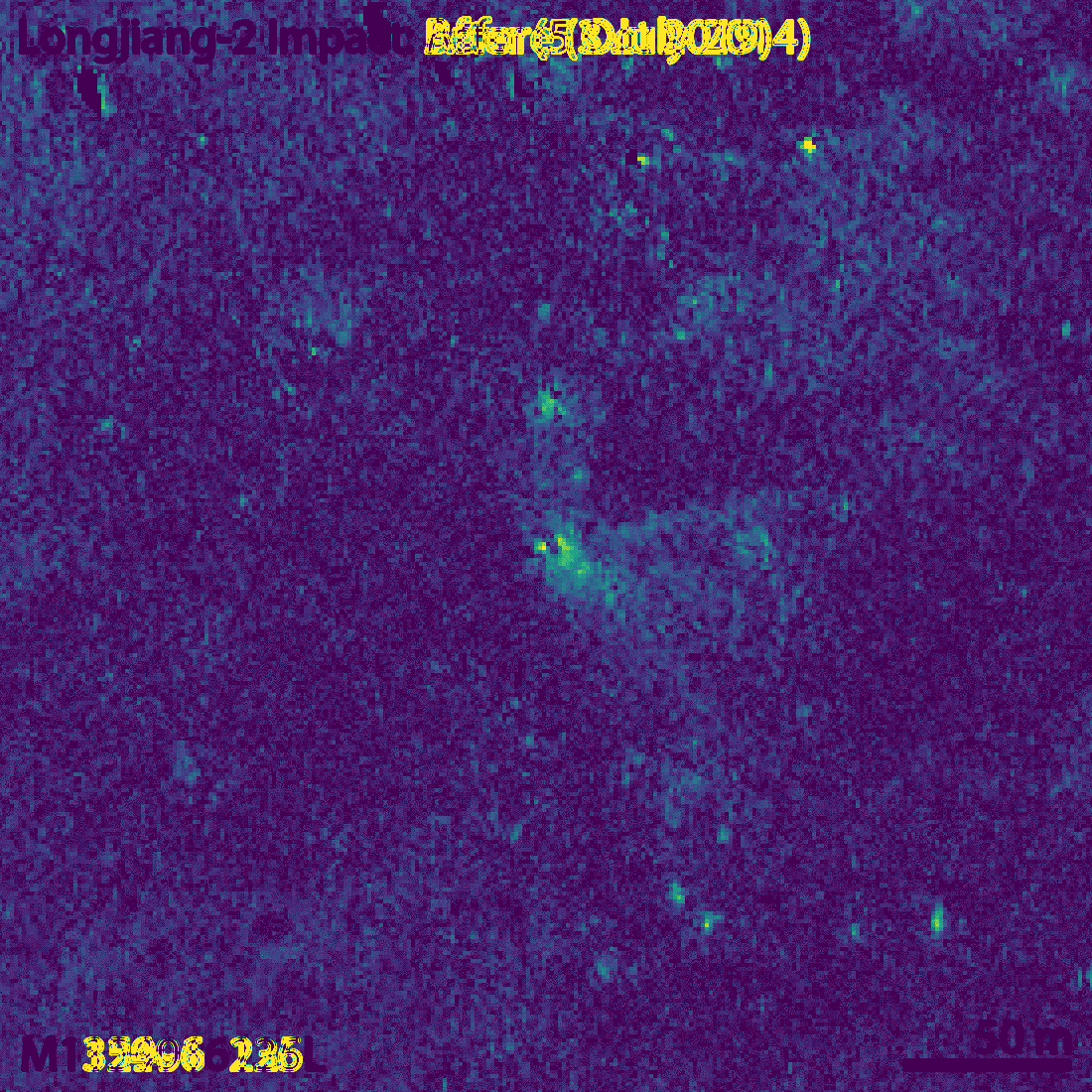
The LROC team has posted the images shown below, where in a comparison between an image taken in 2014 and the image taken in October the small crater can be seen.
DSLWP-B crash site image
The image of the crash is M1324916226L, an image taken by the left NAC camera. However, I can’t find this image yet in the LROC archive, so it seems this image hasn’t been made public yet.
The small crater, which the LROC team estimate to be 4×5 metres in diameter, is visible more clearly if we compute the difference between the before and after images (an idea of Phil Stooke). The figures below show this difference both as a signed quantity and as an absolute value.
Difference in the before and after imagesAbsolute value of the difference between before and after images
Though my eye fails to see it, the LROC team says that the long axis of the crater is oriented in a southwest-northeast direction. This is consistent with the direction of the impact, since DSLWP-B was travelling towards the northeast.
For the comparison with the October 5 image, the LROC team has chosen an image taken with a similar illumination angle. In fact, the lunar phase in both images only differs in 10º, so the shadows are very similar, with the sun located towards the southwest. In fact, the newest image of the area was taken on 2018-10-16, but the one from 2014 probably gave the most similar illumination conditions.
In my post in August I included a link to Quickmap showing the estimated area of the impact. Now I have marked in red the location of the crash. For a sense of scale, the large crater northwest of the crash is some 50 metres in diameter. You can see both points in Quickmap here.
Location of DSLWP-B crash (red) and estimate (blue)
It is good to go back to all the simulations I did to have an idea of what the 328m error represents. My final simulation was done with the ephemeris from July 25, so they were 6 days old at the moment of impact. When I used the ephemeris from July 18, the position of the impact changed by 231m, while the ephemeris from June 28 yielded a change of 496m. Therefore, it seems that an error of 300m is well in line with what we could expect of the precision of the Chinese DSN ephemeris.
The impact location computed by Cees Bassa was 2786m away from my estimate. The main problem with Cees’s estimate is that the orbital model he used considered spherical gravity for the Moon, while my studies showed that it was important to consider non-spherical gravity.
I did most of my simulations with a 10×10 spherical harmonic model for the Moon gravity, but to assess whether this was enough, I also made a simulation with a 20×20 spherical harmonic model. This yielded an impact point which was 74m away from the impact computed with the 10×10 model.
According to my Monte Carlo simulations with a 1km ephemeris error, the 1-sigma ellipse semi-axes of the impact position were 876m in the northeast direction and 239m in the southeast direction. With this information, I gave an educated guess of the position error of 600m in the northeast direction and 200m in the southeasth direction. The actual impact point is 328m northwest of my estimate, so somewhat higher than my error estimate but still within the 2-sigma ellipse. This leaves me quite happy with the quality of my estimate.
Our plan is to get in contact with the LRO team and try to find the crash site in future LRO images. We are confident that this can be done, since they were able to locate the Beresheet impact site a few months ago. However, to help in the search we need to compute the location of the impact point as accurately as possible, and also come up with some estimate of the error to define a search area where we are likely to find the crash. This post is a detailed account of my calculations.
In my last posts about DSLWP-B, I have been showing all the images of the lunar surface that were taken by the satellite during the last weeks of the mission, and tried to identify to which area of the Moon each image corresponded. For several of them, I was able to give a good identification using Google Moon, but for many of the latest images I was unable to find an identification, since they show few or none characteristic craters.
Thus, for these images I only gave a rough prediction of which area of the Moon was imaged by using GMAT and the published ephemeris from dslwp_dev. This doesn’t take into account camera pointing, orbit or shutter time errors.
Phil Stooke has become interested in this and he has managed to identify many of the images, even some containing very little detail, which I find impressive. No wonder, Phil is the author of several atlases of space exploration of the Moon and Mars, so he knows a lot of lunar geography.
Phil tells me that he has used Quickmap, which is a very nice tool that I didn’t know of. It is much more powerful than Google Moon. He recommends to switch to an equidistant cylindrical projection and set as a basemap layer the “WAC mosaic (no shadows) map”, which contains images with the sun directly overhead. This resembles the images taken by DSLWP-B better, since these are always taken with the sun at a high elevation, because the camera always points away from the sun. It is interesting to see how the appearance of the surface changes between the “no shadows” and “big shadows” maps.
In this post I show the locations of the images identified by Phil.
As probably you all know, the Chinese Amateur lunar orbiting satellite DSLWP-B was expected to collide with the Moon on July 31 at 14:20 UTC, so this is the last report about the DSLWP-B activities. The collision was planned since January this year, and was done as a means to end the mission without leaving debris in lunar orbit.
The activation slots for the Amateur payload on-board DSLWP-B for this week were the following:
29 Jul 00:15 to 02:15
29 Jul 04:30 to 06:30
29 Jul 20:00 to 22:00
30 Jul 05:30 to 07:30
30 Jul 16:20 to 18:20
31 Jul 06:30 to 08:30
31 Jul 13:24 to 15.24
1 Aug 05:30 to 07:30
I had calculated a periapsis height of -62km for the July 31 orbit, so the collision with the Moon was quite certain, even taking orbit errors into account. However, a slot was set on August 1 just in case the collision didn’t happen.
This post summarizes the activities done this week with DSLWP-B and the end of the mission.
During the fourth week of July, the Amateur payload on-board DSLWP-B was active in the following slots.
22 Jul 06:14 to 08:14
22 Jul 22:40 to 23 Jul 00:40
23 Jul 23:20 to 24 Jul 01:20
25 Jul 00:30 to 02:30
26 Jul 10:55 to 12:55
27 Jul 02:30 to 04:30
28 Jul 03:30 to 05:30
Additionally, Wei Mingchuan BG2BHC shared on Twitter the 10 minute slots for the activations of the X band transmitter. This transmitter uses a frequency of 8478MHz (in the Deep Space X band) and 2Mbps BPSK with CCSDS standards. The transmit power is 2W and the gain of the small X-band dish is 22dBi. The signal is detectable with small stations (as shown here), but to demodulate the data a large dish is needed. The Chinese DSN uses 35m and 50m antennas to receive this signal.
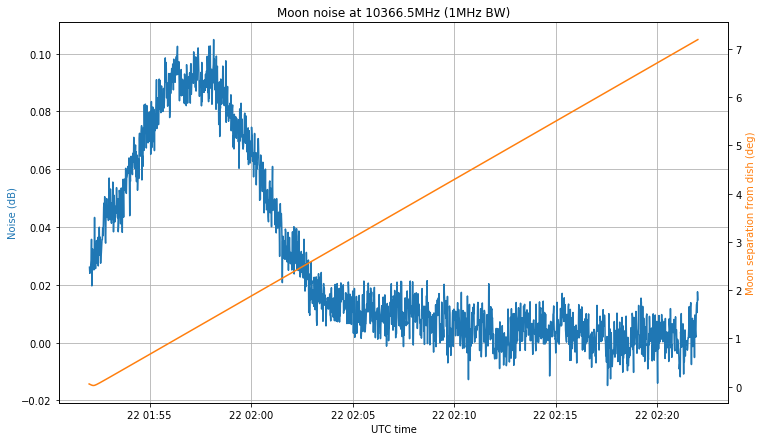
In May 25, the Moon passed through the beam of my QO-100 groundstation and I took the opportunity to measure the Moon noise and receive the Moonbounce 10GHz beacon DL0SHF. A few days ago, in July 22, the Moon passed again through the beam of the dish. This is interesting because, in contrast to the opportunity in May, where the Moon only got within 0.5º of the dish pointing, in July 22 the Moon passed almost through the nominal dish pointing. Also, incidentally this occasion has almost coincided with the 50th anniversary of the arrival to the Moon of Apollo 11, and all the activities organized worldwide to celebrate this event.
The figure below shows the noise measurement at 10366.5GHz with 1MHz and a 1.2m offset dish, compared with the angular separation between the Moon and the nominal pointing of the dish (defined as the direction from my station to Es’hail 2). The same recording settings as in the first observation were used here.
The first thing to note is that I made a mistake when programming the recording. I intended to make a 30 minute recording centred at the moment of closest approach, but instead I programmed the recording to start at the moment of closest approach. The LimeSDR used to make the recording was started to stream one hour before the recording, in order to achieve a stable temperature (this was one lesson I learned from my first observation).
The second comment is that the maximum noise doesn’t coincide with the moment when the Moon is closest to the nominal pointing. Luckily, this makes all the noise hump fit into the recording interval, but it means that my dish pointing is off. Indeed, the maximum happens when the Moon is 1.5º away from the nominal pointing, so my dish pointing error is at least 1.5º. I will try adjust the dish soon by peaking on the QO-100 beacon signal.
The noise hump is approximately 0.085dB, which is much better than the 0.05dB hump that I obtained in the first observation. It may not seem like much, but assuming the same noise in both observations, this is a difference of 2.32dB in the signal. This difference can be explained by the dish pointing error.
The recording I have made also covers the 10GHz Amateur EME band, but I have not been able to detect the signal of the DL0SHF beacon. Perhaps it was not transmitting when the recording was made. I have also arrived to the conclusion that the recording for my first observation had severe sample loss, as it was made on a mechanical hard drive. This explains the odd timing I detected in the DL0SHF signal.
The next observation is planned for October 11, but before this there is the Sun outage season between September 6 and 11, in which the Sun passes through the beam of the dish, so that Sun noise measurements can be performed.
During this week, the Amateur payload of DSLWP-B was active during the following slots:
14 Jul 19:00 to 21:00
15 Jul 12:00 to 14:00
17 Jul 04:40 to 06:50
18 Jul 20:50 to 22:50
20 Jul 14:20 to 16:20
21 Jul 05:30 to 07:30
Among these, the Moon was visible from Europe only on July 14, 18 and 21, so Dwingeloo only observed these days, which were mainly devoted to the download of SSDV images of the lunar surface. As usual, the payload took an image automatically at the start of each slot, so some of the slots were used for autonomous lunar imaging, even though no tracking was made from Dwingeloo.
This post is a detailed account of the activities done with DSLWP-B during the third week of July.
During this week, the Amateur payload of DSLWP-B has been active on the following slots:
2019-07-09 12:30 to 14:30 UTC
2019-07-10 13:50 to 15:50 UTC
2019-07-12 02:00 to 04:00 UTC
2019-07-12 16:30 to 18:30 UTC
In these activations, the last remaining image of the eclipse was downloaded. Also, images of the lunar surface as well as stars have been taken and downloaded. This post is a summary of the activities made with DSLWP-B over the week.