STEREO-A is a NASA solar observation spacecraft that was launched in 2006 to a heliocentric orbit with a radius of about 1 au. One of the instruments, called SECCHI, takes images of the Sun using different telescopes and coronagraphs to study coronal mass ejections. Near real-time images of this instrument can be seen in this webpage. These images are certainly the most eye-catching data transmitted by STEREO-A in its X-band space weather beacon.
In September 2022, Wei Mingchuan BG2BHC made some recordings of the space weather beacon using a 13 meter antenna in Harbin Institute of Technology. I wrote a blog post showing a GNU Radio decoder and a Jupyter notebook analysing the decoded frames. I managed to figure out that some of the data corresponded to the S/WAVES instrument, which is an electric field sensor with a spectrometer covering 125 kHz to 16 MHz.
During this summer, STEREO-A is very close to Earth for the first time since it was launched. This has enabled amateur observers with small stations to receive and decode the space weather beacon. As part of these activities, Alan Antoine F4LAU and Scott Tilley VE7TIL have figured out how to decode the SECCHI images. Scott has published a summary of this in his blog, and Alan has added a decoding pipeline to SatDump. Using this information, I have now extended my Jupyter notebook to decode the SECCHI images. Eventually I want to turn this into a GNU Radio demo, and the Jupyter notebook serves as reference code.
In my last posts about DSLWP-B, I have been showing all the images of the lunar surface that were taken by the satellite during the last weeks of the mission, and tried to identify to which area of the Moon each image corresponded. For several of them, I was able to give a good identification using Google Moon, but for many of the latest images I was unable to find an identification, since they show few or none characteristic craters.
Thus, for these images I only gave a rough prediction of which area of the Moon was imaged by using GMAT and the published ephemeris from dslwp_dev. This doesn’t take into account camera pointing, orbit or shutter time errors.
Phil Stooke has become interested in this and he has managed to identify many of the images, even some containing very little detail, which I find impressive. No wonder, Phil is the author of several atlases of space exploration of the Moon and Mars, so he knows a lot of lunar geography.
Phil tells me that he has used Quickmap, which is a very nice tool that I didn’t know of. It is much more powerful than Google Moon. He recommends to switch to an equidistant cylindrical projection and set as a basemap layer the “WAC mosaic (no shadows) map”, which contains images with the sun directly overhead. This resembles the images taken by DSLWP-B better, since these are always taken with the sun at a high elevation, because the camera always points away from the sun. It is interesting to see how the appearance of the surface changes between the “no shadows” and “big shadows” maps.
In this post I show the locations of the images identified by Phil.
As probably you all know, the Chinese Amateur lunar orbiting satellite DSLWP-B was expected to collide with the Moon on July 31 at 14:20 UTC, so this is the last report about the DSLWP-B activities. The collision was planned since January this year, and was done as a means to end the mission without leaving debris in lunar orbit.
The activation slots for the Amateur payload on-board DSLWP-B for this week were the following:
29 Jul 00:15 to 02:15
29 Jul 04:30 to 06:30
29 Jul 20:00 to 22:00
30 Jul 05:30 to 07:30
30 Jul 16:20 to 18:20
31 Jul 06:30 to 08:30
31 Jul 13:24 to 15.24
1 Aug 05:30 to 07:30
I had calculated a periapsis height of -62km for the July 31 orbit, so the collision with the Moon was quite certain, even taking orbit errors into account. However, a slot was set on August 1 just in case the collision didn’t happen.
This post summarizes the activities done this week with DSLWP-B and the end of the mission.
During the fourth week of July, the Amateur payload on-board DSLWP-B was active in the following slots.
22 Jul 06:14 to 08:14
22 Jul 22:40 to 23 Jul 00:40
23 Jul 23:20 to 24 Jul 01:20
25 Jul 00:30 to 02:30
26 Jul 10:55 to 12:55
27 Jul 02:30 to 04:30
28 Jul 03:30 to 05:30
Additionally, Wei Mingchuan BG2BHC shared on Twitter the 10 minute slots for the activations of the X band transmitter. This transmitter uses a frequency of 8478MHz (in the Deep Space X band) and 2Mbps BPSK with CCSDS standards. The transmit power is 2W and the gain of the small X-band dish is 22dBi. The signal is detectable with small stations (as shown here), but to demodulate the data a large dish is needed. The Chinese DSN uses 35m and 50m antennas to receive this signal.
During this week, the Amateur payload of DSLWP-B was active during the following slots:
14 Jul 19:00 to 21:00
15 Jul 12:00 to 14:00
17 Jul 04:40 to 06:50
18 Jul 20:50 to 22:50
20 Jul 14:20 to 16:20
21 Jul 05:30 to 07:30
Among these, the Moon was visible from Europe only on July 14, 18 and 21, so Dwingeloo only observed these days, which were mainly devoted to the download of SSDV images of the lunar surface. As usual, the payload took an image automatically at the start of each slot, so some of the slots were used for autonomous lunar imaging, even though no tracking was made from Dwingeloo.
This post is a detailed account of the activities done with DSLWP-B during the third week of July.
During this week, the Amateur payload of DSLWP-B has been active on the following slots:
2019-07-09 12:30 to 14:30 UTC
2019-07-10 13:50 to 15:50 UTC
2019-07-12 02:00 to 04:00 UTC
2019-07-12 16:30 to 18:30 UTC
In these activations, the last remaining image of the eclipse was downloaded. Also, images of the lunar surface as well as stars have been taken and downloaded. This post is a summary of the activities made with DSLWP-B over the week.
Now that the DSLWP-B eclipse images have become widespread, appearing even in some newspapers, I have taken the time to identify the features of the lunar surface that can be seen in two of the images. As with any Earth and Moon pictures of DSLWP-B, the part of the Moon that can be seen in these images belongs to the far side, with longitudes of approximately 100º E and 100º W (the division between the near side and the far side happens at 90º E and 90º W, and 0º is the middle of the near side).
I have compared the images with a simulation of the camera view done in GMAT. Using this simulation as a reference and these lunar surface maps as well as Google Moon, I have labelled the features that are visible in the images. The 4K lunar surface map from Celestia Motherlode has been used in GMAT, instead of the default, lower resolution map.
Occultation entry
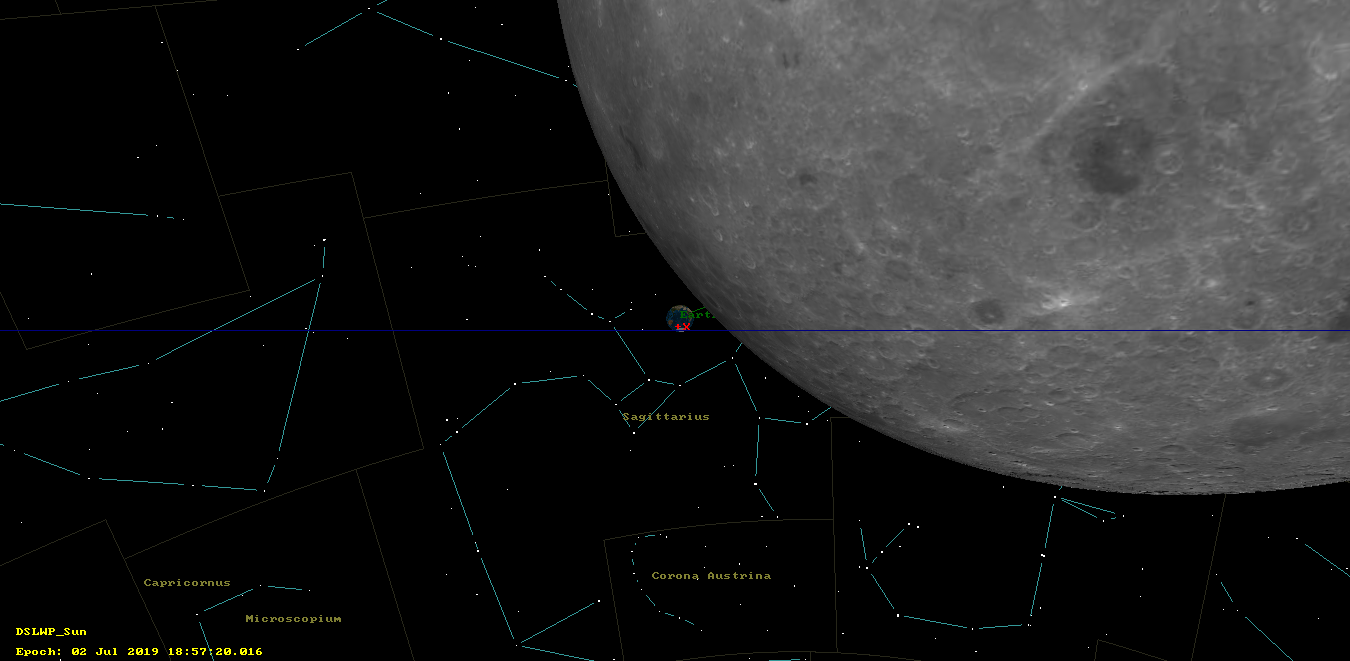
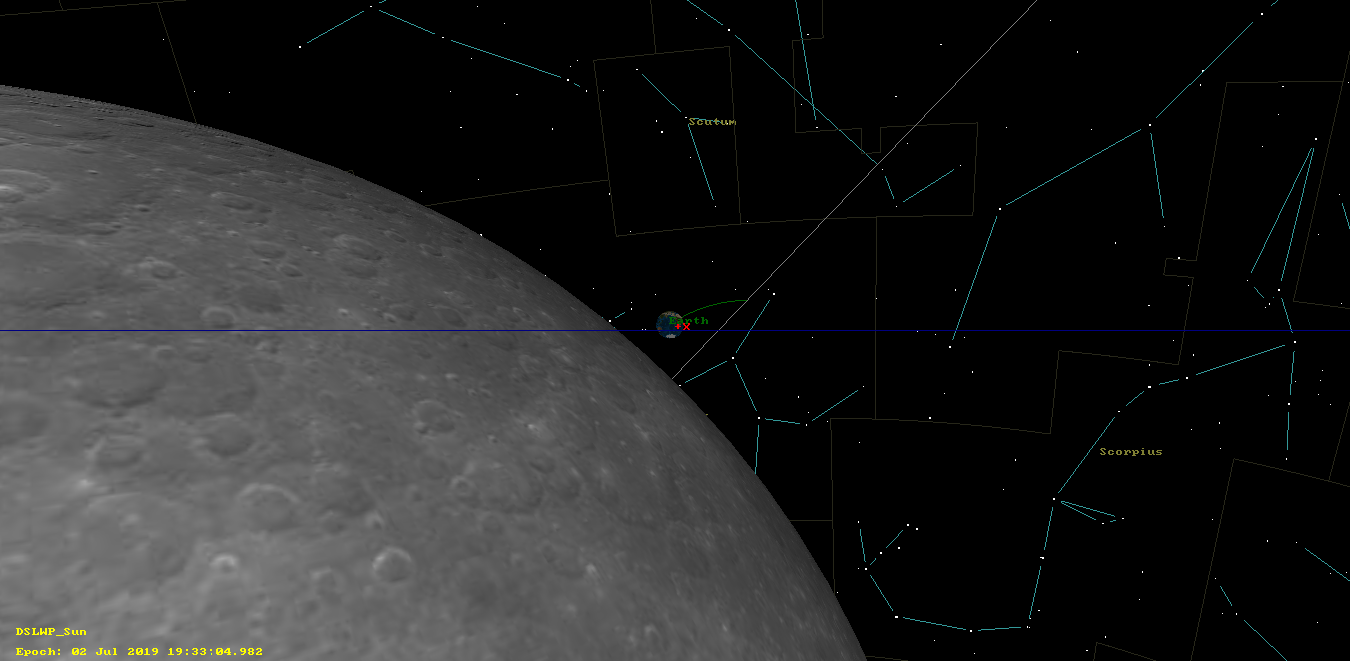
The figure below shows the GMAT camera view simulation for one of the images taken as DSLWP-B was hiding behind the Moon. The field of view in this figure is much larger than the field of view of the DSLWP-B Inory eye camera. The up direction is the normal to DSLWP-B’s orbit around the Sun (defined as the plane containing the position and velocity vectors with DLSWP-B with respect to the Sun). Therefore, it points approximately towards the north pole. DSWLP-B is moving towards the upper right corner of this image.
GMAT camera view simulation for image 0xE2
The figure belows shows the ground track view. The satellite has crossed the near side and is now starting to orbit over the far side, soon becoming hidden behind the Moon.
GMAT ground track view for image 0xE2
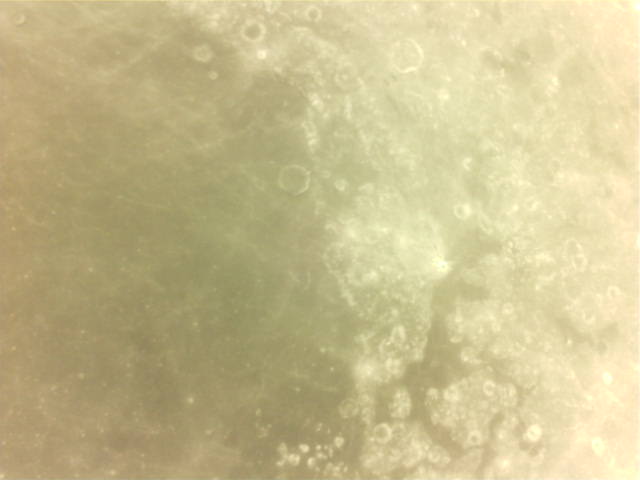
Image 0xE2, taken on 2019-07-02 18:57:20 is shown below. The image has been rotated to match the orientation of the GMAT camera view simulation.
Image 0xE2, rotated
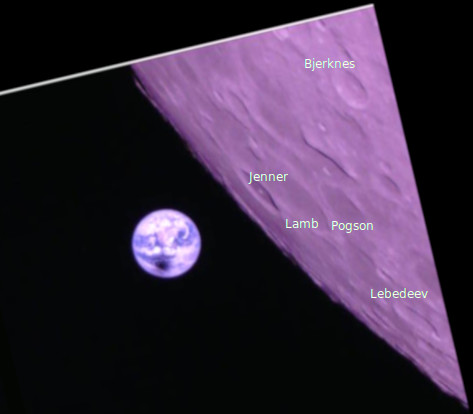
The craters that are visible in this image are labeled in the figure below. These belong to the Mare Australe region, and several well known craters such as Jenner and Lamb can be seen.
Image 0xE2, rotated and labelled
Tammo Jan Dijkema has done a similar exercise with image 0xE3, which was taken a minute after the image shown above. DSLWP-B has moved towards the upper right corner of the image, so that a larger portion of the lunar surface is visible.
Here's the solar eclipse imaged from lunar orbit again, now with some lunar features labeled. These are of course all features on the far side of the Moon. pic.twitter.com/zMY9cxSgZ4
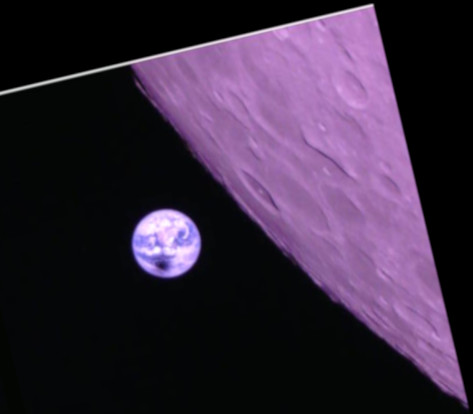
The figure below shows the GMAT camera view simulation corresponding to image 0xE5, which was taken shortly after DSLWP-B exited the occultation, so that the Earth was visible again.
GMAT camera view simulation for image 0xE5
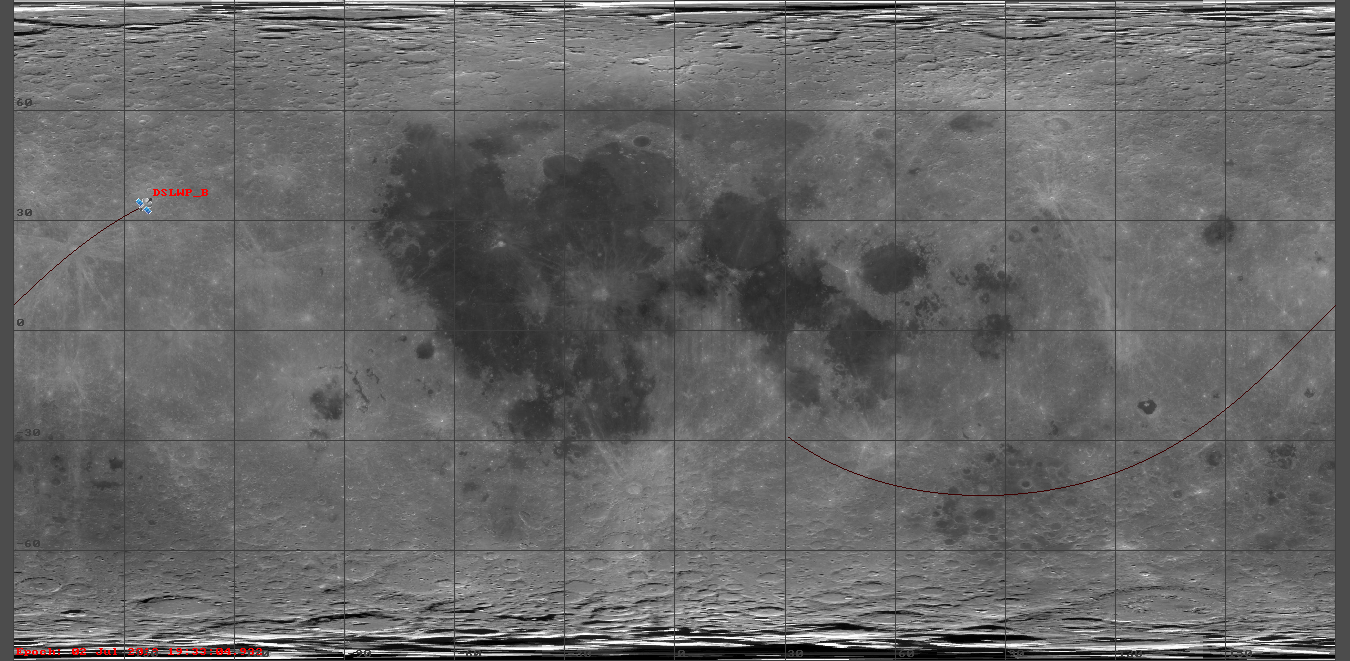
Below we see the ground track corresponding to this image. The satellite has crossed the far side of the Moon in a south to north direction and soon will cross over to the near side.
GMAT ground track view for image OxE5
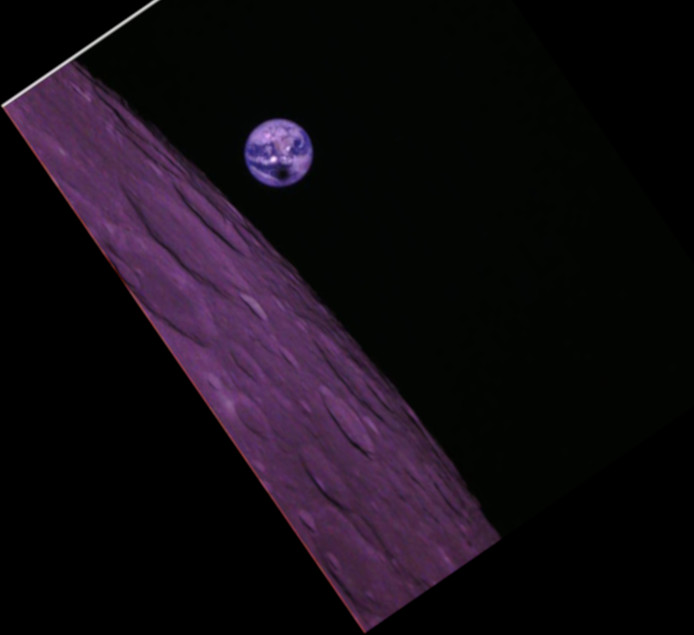
The figure below is image 0xE5, which was taken on 2019-07-02 19:33:05. It has been rotated to match the orientation of the GMAT simulation.
Image 0xE5, rotated
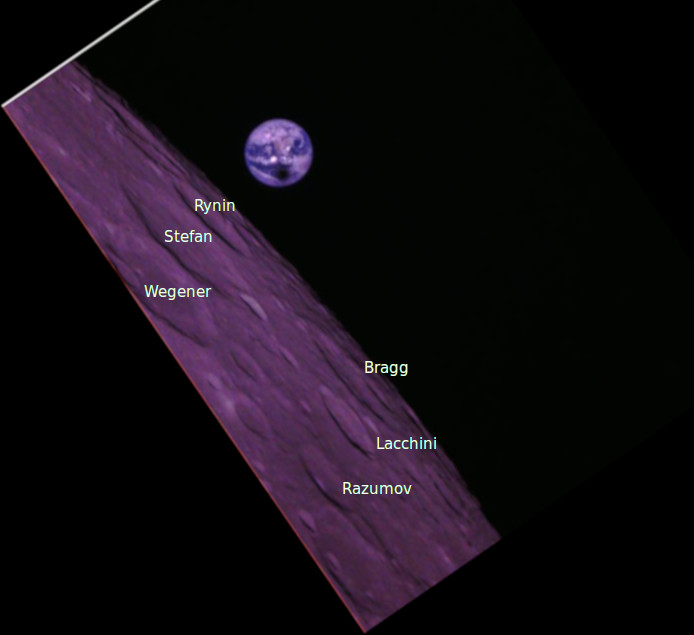
The craters are labelled in the figure below. Important craters in the Coulomb-Sarton basin such as Stefan and Bragg are visible. An image of this region with the craters labelled can be seen here.
I have devoted the lastfewpoststo the planning of the imaging times for the eclipse test run and the validation of the test run done on June 30. This post is a detailed account of the results of the eclipse imaging. Between July 3 and 5, five of the six eclipse images taken on July 2 were downloaded, as well as some other images taken later. Here I give a summary of the downloads during these days and compare the images to the predictions I made.
Yesterday I did an analysis of the image taken and downloaded during the test run for the imaging of the solar eclipse shadow on the Earth with DSLWP-B on July 2. Only one of the six images taken to validate the camera exposure and pointing and orbit errors was downloaded yesterday. The window to download the remaining images was during today’s activation of the Amateur payload between 05:30 and 07:30 UTC.
Three images were downloaded today, with a few missing chunks. Moreover, Wei Mingchuan BG2BHC has sent me better ephemeris, which give a more accurate prediction of the orbit both on the June 30 test run and on the eclipse imaging run on July 2. This post is an analysis of the images downloaded today.
As described in one of my latest posts, today DSLWP-B has made a test imaging run in preparation for the solar eclipse on July 2. A series of images was taken just before the Moon hid the centre of the camera field of view and just after the Moon left the centre of the image, in approximately the same relative positions as for the July 2 eclipse imaging run.
The activation of the Amateur payload started at 05:30 UTC and the payload was commanded to change the configuration of the camera to use 2x zoom. The satellite was occulted by the Moon at 05:40 UTC, preventing the reception of telemetry until it reappeared at 06:16 UTC. The first series of images was taken automatically between 05:51 and 05:54, with the satellite behind the Moon.
After the satellite reappeared from behind the Moon, telemetry confirmed that three images, with IDs 0xD9, 0xDA and 0xDB had been taken. Between 06:29 and and 06:32, the satellite took the second series of images. Telemetry confirmed that these images were taken correctly with IDs 0xDC, 0xDD and 0xDE.
The priority was to use the rest of the activation to download images 0xDA and 0xDD, taken respectively at 05:52:40 and 06:31:10 UTC (when reading the times given in the planning post, note that the times listed there are the moments when the command is sent to the payload by the satellite, but the payload needs about 20 additional seconds to take the image). However, there were difficulties in commanding the payload, so half an hour was lost trying to command the satellite and only image 0xDA could be downloaded before the payload went off at 07:30 UTC.
Image 0xDA was downloaded without errors in a single transmission. It is shown below.
Image 0xDA, taken on 2019-06-30 05:52:40, downloaded between 07:11 ad 07:26
As we see, the exposure of the image is correct, so this image validates that the camera configuration can be used for the eclipse imaging run. Additionally, the image can be used to evaluate camera pointing and ephemeris errors.
As computed in this Jupyter notebook, the separation between the Moon rim and the centre of the field of view in the image shown above is 6.47 degrees. Using the camera calculations Jupyter notebook that I have shown in previous posts, we see that, according to the 20190630 ephemeris from dslwp_dev and my GMAT calculations, the angular distance between the Moon rim and the centre of the image at 05:52:40 UTC should be 3.25 degrees, assuming that the camera points perfectly away from the Sun.
The rate at which the Moon rim moves through the field of view is approximately 0.029 degrees per second. Thus, if the camera was pointing perfectly away from the Sun, this would indicate that DSLWP-B is 110 seconds earlier in its orbit that what predicted by the ephemeris, so that events concerning the relative position of the satellite and the Moon happen 110 seconds later than predicted.
However, one should take these calculations with a grain of salt. In my astrometry post, I showed that the camera was pointing 3.25 degrees off-axis. Therefore, it is convenient to assume an error of +/-3.25 degrees in the angle measurement done with the image. In units of time, this is +/-111 seconds.
So the data seems to suggest that DSLWP-B is one or two minutes earlier in its orbit and that the imaging times should be compensated by making them one or two minutes later, but there is not enough statistical evidence to support this argument. It will be very interesting to see image 0xDD, which will be downloaded tomorrow. The analysis of this image will give additional data.
In any case, so far it seems that orbit and pointing errors are within the tolerance given by the series of three images, which are taken at -1, 0, and +1 minutes offset from the nominal imaging time computed by Wei.





{kind=link}