In my last post, I spoke about the images taken by DSLWP-B, the Chinese lunar orbiting Amateur satellite, during the first week of June. One of these images was the picture of stars shown below, taken on 2019-06-07 08:00 UTC.

Although it may seem that this image is not very interesting in comparison with the other awesome images of the Earth and the Moon, the stars that appear in the image can be used as a reference to compute where the camera was aiming. In a previous post, I used an image of stars to compute the field of view of the camera. In this post, I will assess the accuracy in the camera pointing. Currently, there exist only two images of stars taken by DSLWP-B, so it is interesting to try to study these as much as possible.
The DSLWP-B camera is supposed to aim away from the Sun, since in the nominal attitude the solar panel aims directly towards the Sun, and the camera is placed opposite to the solar panel. However, the aiming can be off by a few degrees.
The first step in processing the image is to detect the stars and to match their positions against a database to try to compute the camera orientation, as well as its field of view and any possible distortion introduced in the image. To do so, I have used the web service from Astrometry.net.
The image uploaded to Astrometry.net can be seen here. It has been edited slightly to remove some of the lens flare, since otherwise the service failed to identify the image. We can already see there the stars that the service has identified and some data regarding the image, such as a field of view of 38×28.5 degrees (I estimated 37×28 in my post), and a pointing of right azimuth 16h 56m 07.929s and declination of -19° 29′ 48.998″, between the constellations of Ophiucus and Scorpius.
The position of the Sun, as seen from DSLWP-B in ICRF coordinates is computed in the GMAT script photo_icrf.script. Then a Jupyter notebook with Astropy is used to compute the right ascension and declination of the vector that points away from the Sun. This is the nominal camera pointing, which corresponds to a right ascension of 16h 58m 57.1908s and declination of -22º 41′ 34.728”.
An alternative simpler approach is to use Astropy to compute the position of the Sun as seen from the centre of the Earth. This will not be the same as the position of the Sun as seen by DSLWP-B, since the Earth and DSLWP-B are approximately 400000km away, but it will be close enough. Indeed, in this case, the separation between both positions is 0.1º.
Astrometry.net generates several FITS files with information about the calibration of the image. These can be opened in Astropy. One of the files is a list of positions of the stars identified in the image and their real positions in the sky, both in terms of right ascension and declination and in terms of pixels in the image. It is interesting to study this to see what the error is, and check whether there is any distortion in the image that is not modeled by Astrometry.net. In this case, the RMS error is 0.027º, or 97 arc-seconds, which corresponds to 0.45 pixels.
Another of the files generated by Astrometry.net is a WCS file that allows us to translate between pixel coordinates on the image and right ascension and declination coordinates on the sky using Astropy’s WCS module. This can be used to generate the image below, which has an increased contrast and the viridis color map so that stars are seen more easily, and marks the positions of the brightest stars (as computed by Astropy).
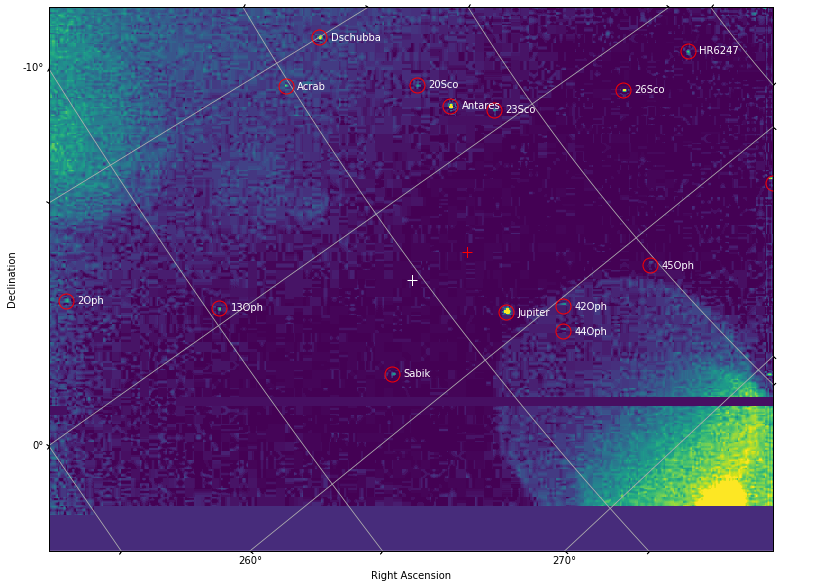
Jupiter can also be seen as the brightest point in the image. Its position was computed in Astropy using the position as seen from Earth. As in the case of the Sun, this is not exactly the same position as seen by DSLWP-B, but the difference is small.
The centre of the image is shown with a white cross, while the nominal camera pointing (the direction away from the Sun) is show with a red cross for comparison. The separation between both is 3º 14′ 51.5131”, which confirms the fact that the camera pointing is usually off by a few degrees.
2 comments