This is a continuation of my series of posts about LTE. In the previous post we looked at the downlink cell-specific reference signals (CRS), transmit diversity equalization, and the demodulation of the PBCH (physical broadcast channel), PCFICH (physical control format indicator channel) and PDSCH (physical downlink shared channel). In this post we will look at the PHICH (physical hybrid ARQ indicator channel). As usual, I will be analysing the recording of a base station that I did in the first post about the LTE downlink.
The PHICH is used to send hybrid-ARQ ACK/NACKs to the UEs. Each PHICH transmission carries a single bit, either ACK (encoded by the bit 1) or NACK (encoded by the bit 0). Repetition encoding is used to increase the chances of correct decoding, and an orthogonal overlay code allows transmitting information for several UEs using the same resource elements.
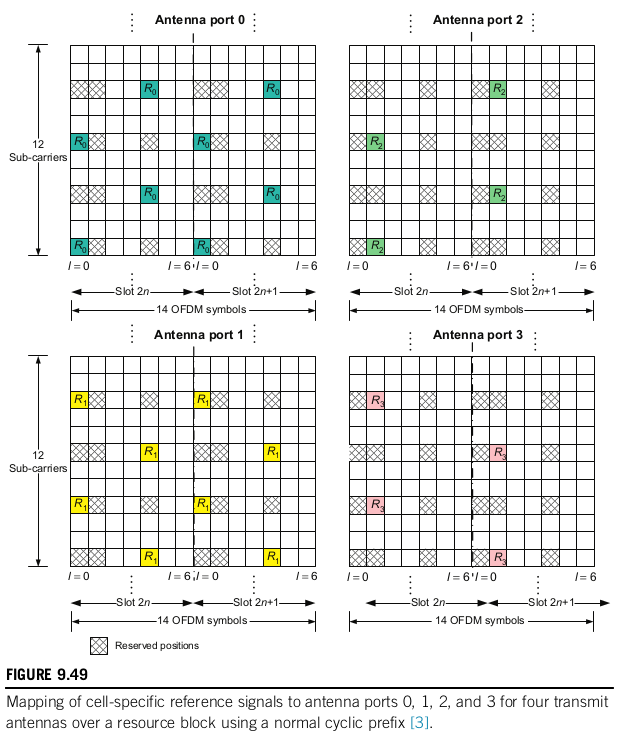
The PHICH is transmitted in the control region of the subframe, which is formed by the first 1, 2, or 3 symbols of the subframe (according to the CFI value). As other control channels, the PHICH uses REGs. Recall that a REG is a set of 4 resource elements which are not used for the transmission of the CRS and which are adjacent in frequency if we ignore the resource elements used for the CRS. For instance, when 2 or 4 antenna ports are used for the CRS, in the first symbol of the subframe two resource elements in every block of 6 are used for the CRS. The other 4 resource elements form a REG. Therefore, there are 2 REGs per resource block. In symbols 2 and 3 there may not be resource elements allocated to the CRS, so there are 3 REGs per resource block in that case.
A PHICH transmission uses 3 REGs which are equally spaced over the bandwidth of the cell, in order to give frequency diversity. This is similar to the PCFICH, which uses 4 equally spaced REGs in the first symbol of the subframe. Depending on the configuration of a parameter called PHICH duration, the PHICH can either use the first symbol in each subframe (normal PHICH duration), or the first 2 or 3 symbols in each subframe (extended PHICH duration). Here we will only look at the normal PHICH duration, which is what is used in the recording. In the normal duration, the 3 REGs are transmitted simultaneously in the first symbol of the subframe. In the extended duration the 3 REGs are distributed over the first 2 or 3 symbols of the subframe.
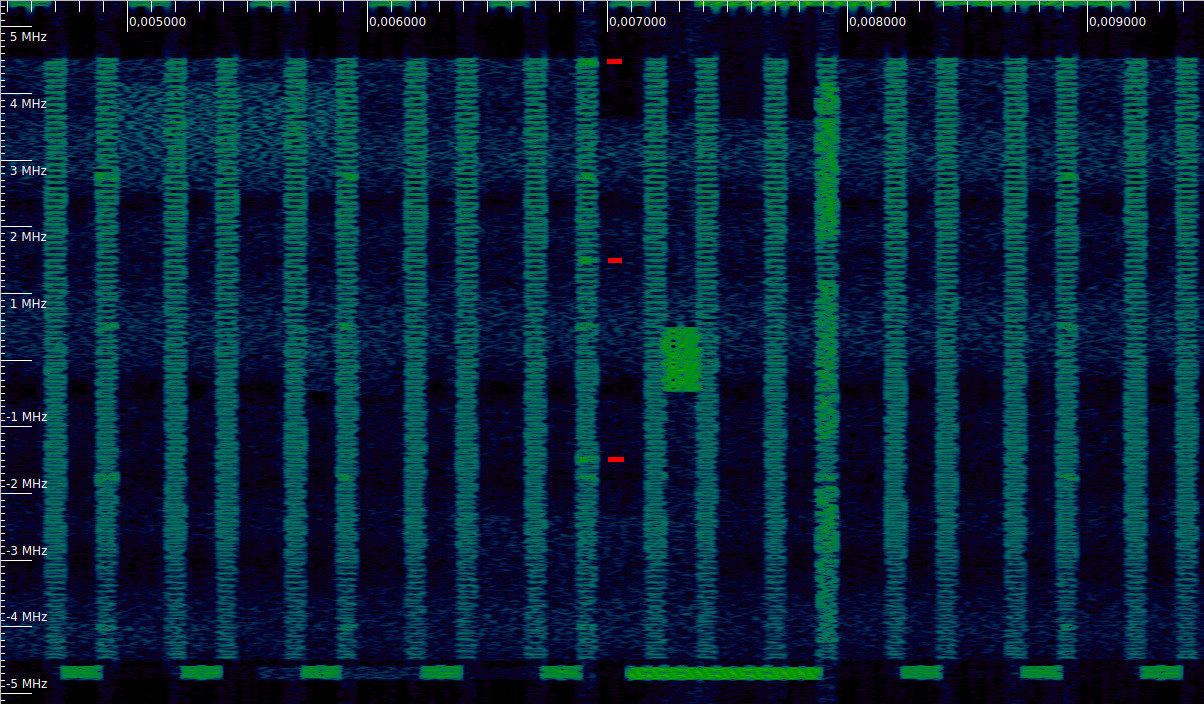
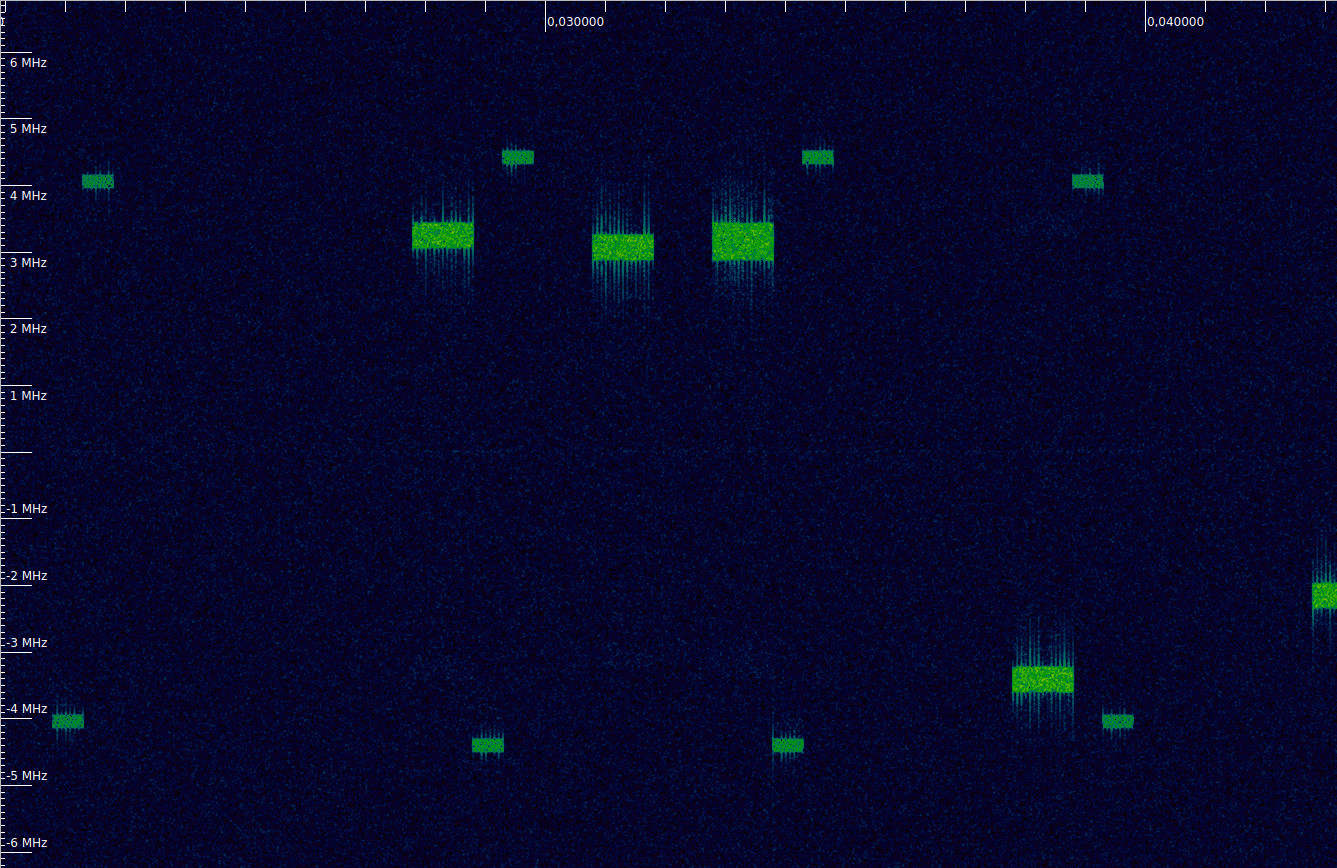
In the waterfall below we can see a PHICH transmission. In the first symbol of each subframe we can see the 4 REGs used by the PCFICH (the lower frequency REG, at around -4 MHz is barely visible). In the subframe near the centre of the image (which incidentally contains the synchronization signals), in addition to these 4 REGs, there are 3 more REGs in use, which I have marked with red ticks. These form a PHICH transmission.