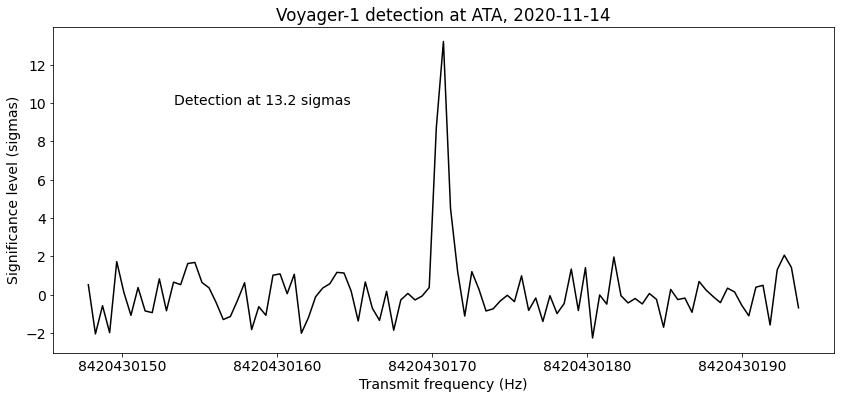
This post has been delayed by several months, as some other things (like Chang’e 5) kept getting in the way. As part of the GNU Radio activities in Allen Telescope Array, on 14 November 2020 we tried to detect the X-band signal of Voyager-1, which at that time was at a distance of 151.72 au (22697 millions of km) from Earth. After analysing the recorded IQ data to carefully correct for Doppler and stack up all the signal power, I published in Twitter the news that the signal could clearly be seen in some of the recordings.
Since then, I have been intending to write a post explaining in detail the signal processing and publishing the recorded data. I must add that detecting Voyager-1 with ATA was a significant feat. Since November, we have attempted to detect Voyager-1 again on another occasion, using the same signal processing pipeline, without any luck. Since in the optimal conditions the signal is already very weak, it has to be ensured that all the equipment is working properly. Problems are difficult to debug, because any issue will typically impede successful detection, without giving an indication of what went wrong.
I have published the IQ recordings of this observation in the following datasets in Zenodo: