I have been playing with some LTE recordings to brush up my knowledge, since it isn’t a protocol I’m very familiar with. I’m specially interested in understanding the structure and properties of all the pilot signals. Textbooks and documentation are great, but nothing beats getting your hands dirty with some IQ recordings to be sure you understand all the details.
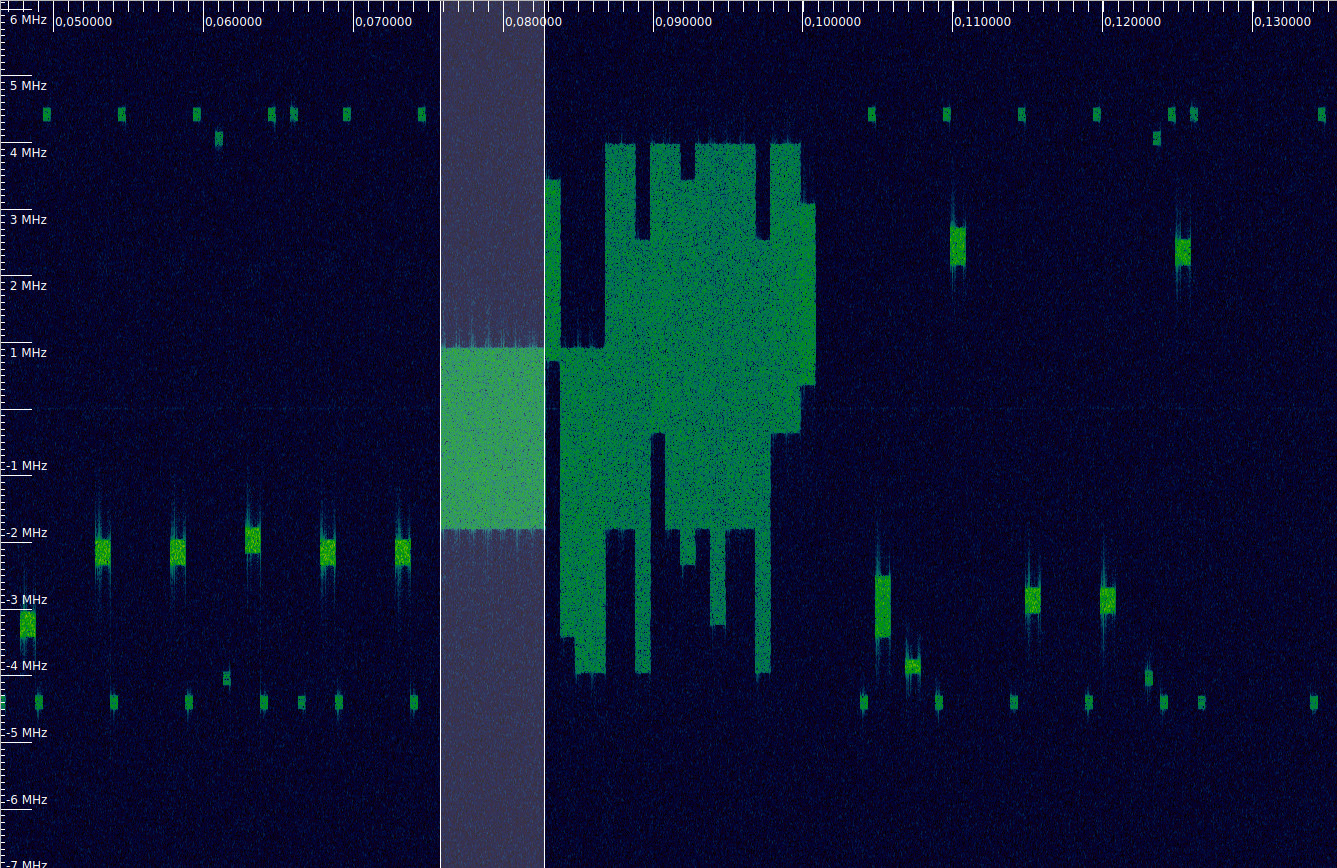
To have something to work with, I have done some recordings of my phone by holding it near a USRP B205mini without an antenna. While recording, I was playing a Youtube video or browsing the web, to have some traffic. A waterfall of one of the recordings can be seen below. In this post we will be looking at how to demodulate the highlighted section, which contains 7 ms of PUSCH (physical uplink shared channel) occupying 15 resource blocks, together with the corresponding DMRS (demodulation reference signal) symbols. The post assumes some familiarity with OFDM, but doesn’t require any previous knowledge of LTE, so it can be useful to people interested in a hands-on introduction to LTE.