In my last post, I spoke about the future lunar impact of DSLWP-B on July 31. Edgar Kaiser DF2MZ asked over on Twitter if the impact would be visible from Earth. As I didn’t know the answer, I have made a simulation in GMAT to find this out.
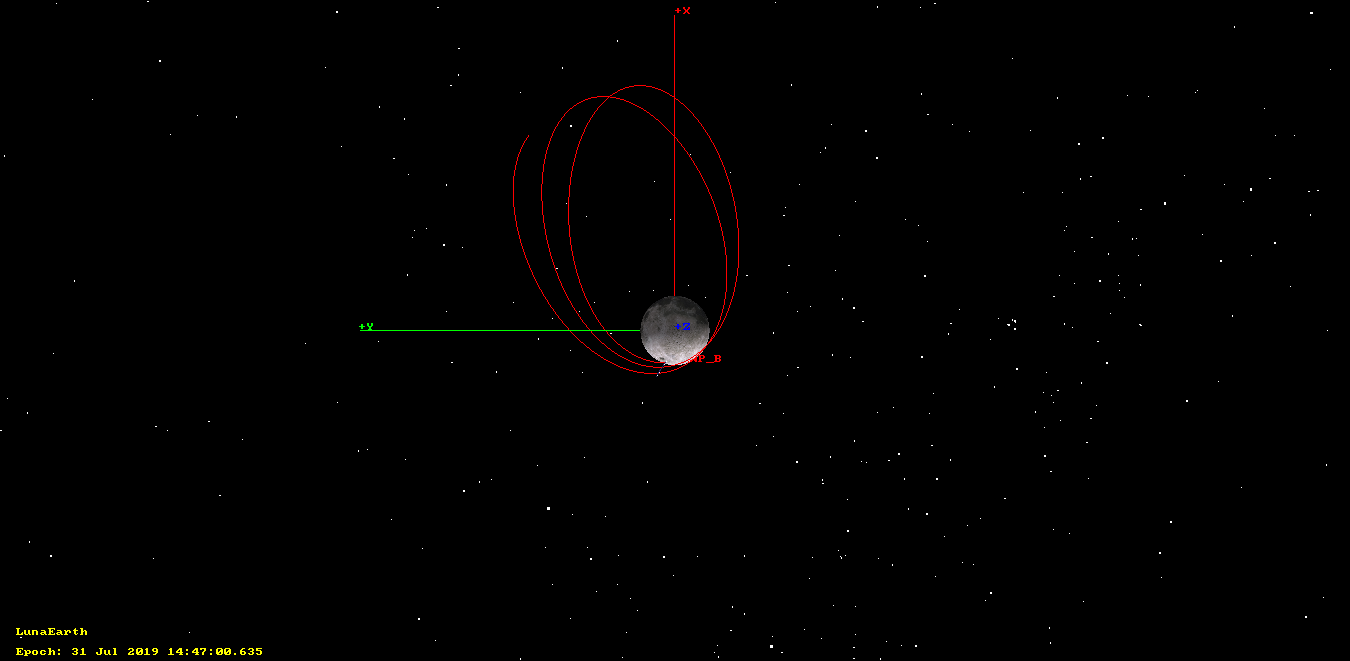
The figure below shows the orbit of DSLWP-B between July 28 12:00 UTC and the moment of impact, on July 13 14:47 UTC. The orbital state used for DSLWP-B is the 20190426 tracking file from dslwp_dev. The reference frame is arranged so that the +X axis points towards the Earth, and the Y axis lies on the Earth-Moon orbital plane. As we can see, unfortunately, the impact will happen on the far side of the Moon, where it is not observable from Earth.
However, it is possible to arrange a manoeuvre to modify the orbit slightly and make the impact point fall on the near side of the Moon, where it is visible from Earth. In the previous post we observed that, ignoring the collision with the lunar surface, the periapsis radius would continue to decrease after July 31, until reaching a minimum value in January 2020.
Therefore, it is possible to raise the periapsis radius slightly in order to delay the collision approximately half a lunar month, so that the periapsis faces the Earth at the moment of impact. The delta-v required to make this manoeuvre is small, as the adjustment to the orbit is subtle.
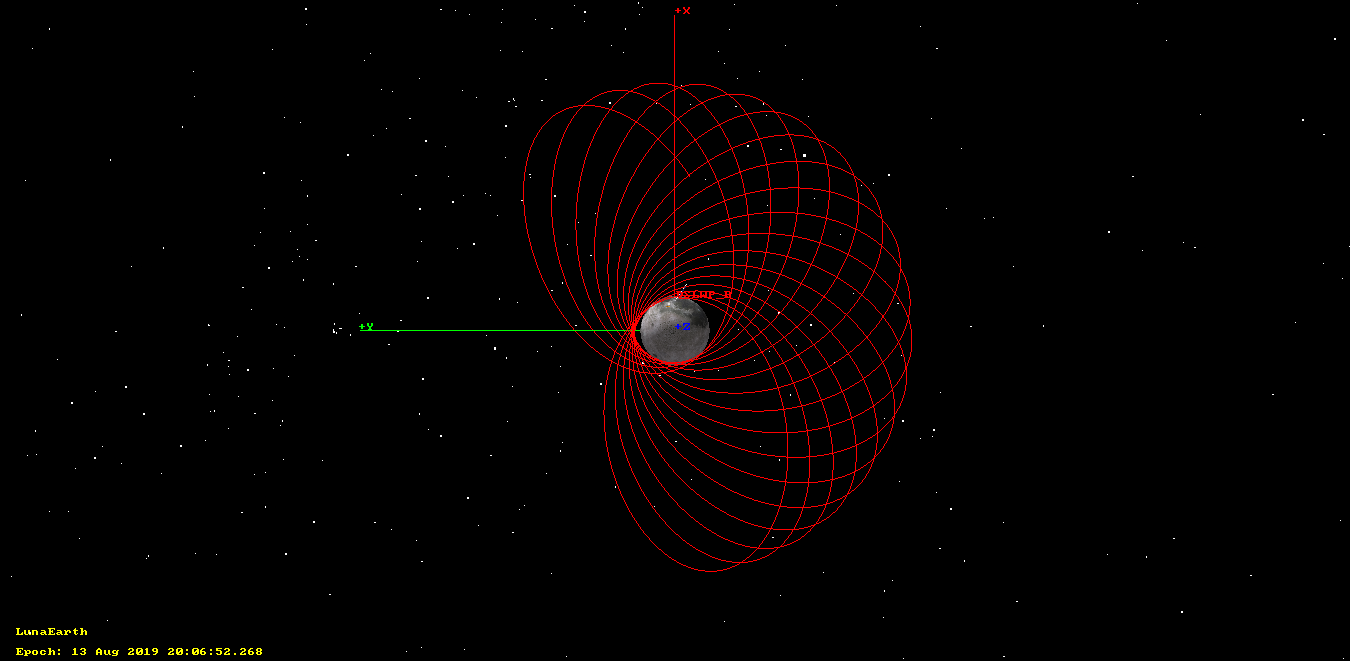
For instance, performing a prograde burn of 7m/s at the first apoapsis after July 1 delays the collision until August 13, producing an impact in the near side of the Moon. The resulting orbit can be seen in the figure below, which shows the path of DSLWP-B between July 28 and the moment of impact.
Adjusting the delta-v more precisely would make it possible even to control the time of the impact, so as to guarantee that the Moon will be in view of the groundstations at China and The Netherlands when the collision happens. However, this adjustment requires a very precise delta-v and is quite sensitive to the orbital state, so perhaps it is not feasible without performing a precise orbit determination and maybe some smaller correction manoeuvres following the periapsis raise.
Another possible problem that can affect the prediction of the impact point are the perturbations of the orbit caused by the lunar mascons, which can be noticeable when the altitude of the orbit starts getting small, and which haven’t been considered very carefully in this simulation (the non-spherical gravity of the Moon was only simulated up to degree and order 10).
The GMAT script used for this post can be found here.