The first Amateur VLBI experiment with DSLWP-B was performed on 2018-06-10. In that experiment, the 250baud GMSK beacons at 435.4MHz and 436.4MHz were recorded in the 25m PI9CAM radiotelescope in Dwingeloo, The Netherlands, and a 12m repurposed Inmarsat C-band dish in Shahe, Beijing. These synchronized recordings were processed later to obtain delta-range and delta-velocity measurements. Due to the low baudrate, the noise of the delta-range measurements was quite high, on the order of 20km. Since the beacons were short transmissions of 15 seconds, making accumulated phase measurements was not possible.
Another Amateur VLBI experiment was performed on 2018-11-21. The novelty of this experiment was that 500baud GMSK SSDV transmissions were made on 436.4MHz. These long transmissions, lasting around 30 minutes each, allow us to make accumulated phase measurements. Also, the higher baudrate reduces the noise in the delta-range measurements. Another novelty was that a third station, the Harbin Institute of Technology Amateur Radio Club BY2HIT groundstation also joined the experiments, so observations from three stations are available.
This post is an account of the results I have obtained processing the observations from 2018-11-21.
A few days ago, I spoke about the future impact of DSLWP-B on the lunar surface, which will happen in the far side of the Moon around the end of July, and how the spacecraft could be manoeuvred to make the impact point fall on the near side of the Moon instead, so that it can be observed from Earth.
Philip Stooke made a very good remark in the comments saying that the impact might have been planned on the far side of the Moon deliberately in order to avoid Apollo landing sites and other heritage sites. This is a very valid concern. By all means, the crash should be planned to avoid disturbing heritage sites or other areas of specific interest.
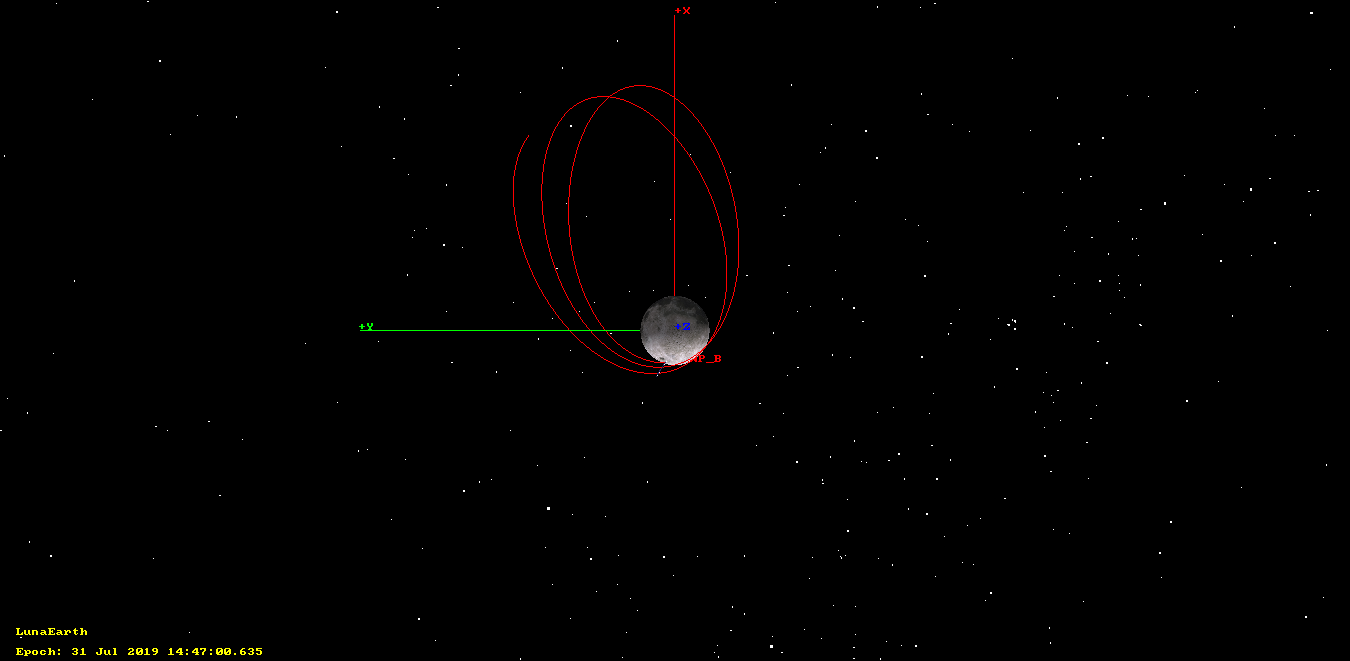
In my last post, I spoke about the future lunar impact of DSLWP-B on July 31. Edgar Kaiser DF2MZasked over on Twitter if the impact would be visible from Earth. As I didn’t know the answer, I have made a simulation in GMAT to find this out.
The figure below shows the orbit of DSLWP-B between July 28 12:00 UTC and the moment of impact, on July 13 14:47 UTC. The orbital state used for DSLWP-B is the 20190426 tracking file from dslwp_dev. The reference frame is arranged so that the +X axis points towards the Earth, and the Y axis lies on the Earth-Moon orbital plane. As we can see, unfortunately, the impact will happen on the far side of the Moon, where it is not observable from Earth.
Future impact of DSLWP-B on the far side of the Moon
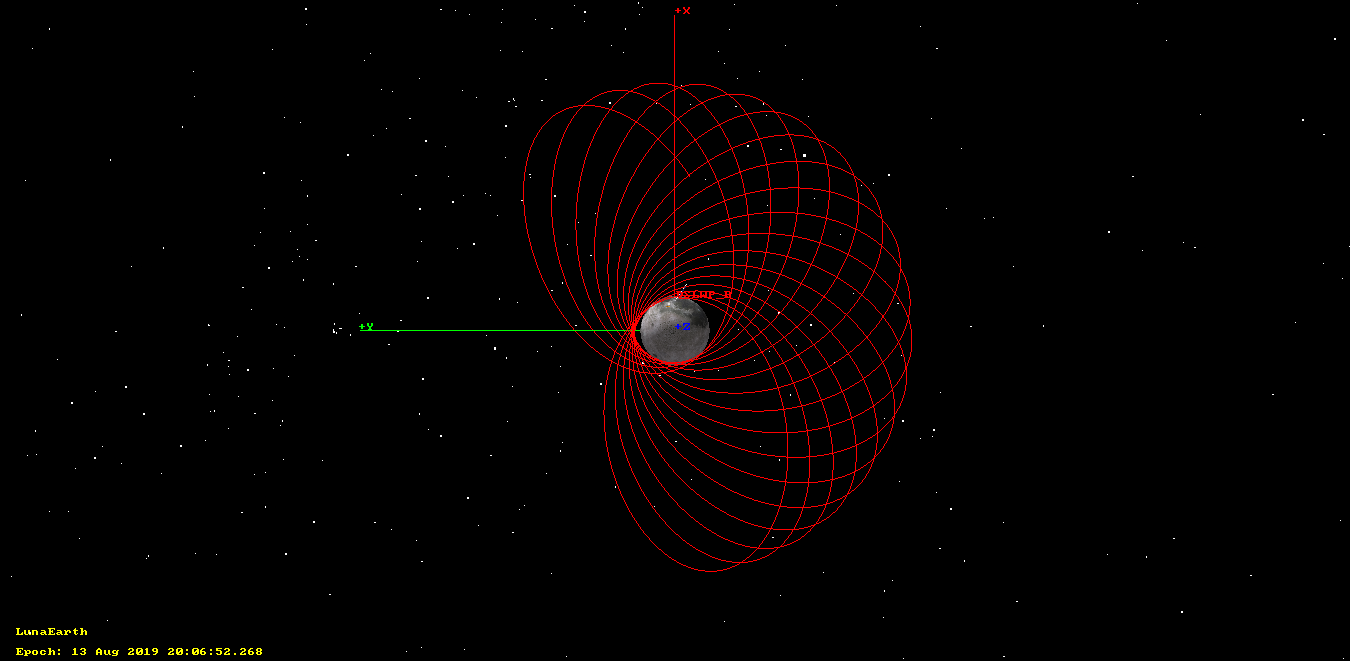
However, it is possible to arrange a manoeuvre to modify the orbit slightly and make the impact point fall on the near side of the Moon, where it is visible from Earth. In the previous post we observed that, ignoring the collision with the lunar surface, the periapsis radius would continue to decrease after July 31, until reaching a minimum value in January 2020.
Therefore, it is possible to raise the periapsis radius slightly in order to delay the collision approximately half a lunar month, so that the periapsis faces the Earth at the moment of impact. The delta-v required to make this manoeuvre is small, as the adjustment to the orbit is subtle.
For instance, performing a prograde burn of 7m/s at the first apoapsis after July 1 delays the collision until August 13, producing an impact in the near side of the Moon. The resulting orbit can be seen in the figure below, which shows the path of DSLWP-B between July 28 and the moment of impact.
Impact of DSLWP-B on the near side of the Moon if a correction manoeuvre is applied
Adjusting the delta-v more precisely would make it possible even to control the time of the impact, so as to guarantee that the Moon will be in view of the groundstations at China and The Netherlands when the collision happens. However, this adjustment requires a very precise delta-v and is quite sensitive to the orbital state, so perhaps it is not feasible without performing a precise orbit determination and maybe some smaller correction manoeuvres following the periapsis raise.
Another possible problem that can affect the prediction of the impact point are the perturbations of the orbit caused by the lunar mascons, which can be noticeable when the altitude of the orbit starts getting small, and which haven’t been considered very carefully in this simulation (the non-spherical gravity of the Moon was only simulated up to degree and order 10).
The GMAT script used for this post can be found here.
On January 24, the periapsis of the lunar orbit of DSLWP-B was lowered approximately by 500km, so that orbital perturbations would eventually force the satellite to collide with the Moon. This was done to put an end to the mission and to avoid leaving debris in orbit. It is expected that the collision will happen at the end of July, so there are only three months left now for the DSLWP-B mission. Here I look at the details of the deorbit.
In February this year, the orientation of the orbit of DSLWP-B around the Moon was such that, when viewed from the Earth, it passed behind the Moon on every orbit. This opened up the possibility for recording the signal of DSLWP-B as it hid behind the Moon, thus blocking the line of sight path. The physical effect that can be observed in such events is that of diffraction. The power of the received signal doesn’t drop down to zero in a brick-wall fashion just after the line of sight is blocked, but rather behaves in an oscillatory fashion, forming the so called diffraction fringes.
The signal from DSLWP-B was observed and recorded at the Dwingeloo 25m radiotelescope for three days in February: 4th, 13th and 15th. During the first two days, an SSDV transmission was commanded several minutes before DSLWP-B hid behind the Moon, so as to guarantee a continuous signal at 436.4MHz to observe the variations in signal power as DSLWP-B went behind the Moon. On the 15th, the occultation was especially brief, lasting only 28 minutes. Thus, DSLWP-B was commanded to transmit continuously before hiding behind the Moon. This enabled us to also observe the end of the occultation, since DSLWP-B continued transmitting when it exited from behind the Moon. This is an analysis of the recordings made at Dwingeloo.
The image accompanying this post has a nice story to it. It was taken by the Amateur camera in DSLWP-B, the Chinese microsatellite in lunar orbit. On February 27, a download of this image was attempted by transmitting the image in SSDV format in the 70cm band and receiving it in the Dwingeloo radiotelescope, in the Netherlands.
The download was attempted twice, but due to errors in the transmission, a small piece of the image was still missing. Today, the Amateur payload of DSLWP-B was active again, and the plan was to download the missing piece, as well as other images. However, after the payload turned on and transmitted its first telemetry beacons, we discovered that the image had been overwritten.
The camera on-board DSLWP-B has a buffer that stores the last 16 images taken. Any of these images can be selected to be transmitted (completely or partially) while the Amateur payload is active. An image can be taken manually by issuing a command from ground. Besides this, every time the Amateur payload powers on, an image is taken. Of course, taking new images overwrites the older ones.
This is what happened today. The image we wanted to download was the oldest one in the buffer and got overwritten as soon as the payload turned on. This is a pity, especially because there was another activation of the payload last Friday, but a large storm in Germany prevented Reinhard Kuehn DK5LA’ from moving his antennas safely, so the satellite couldn’t be commanded to start the download.
After seeing that the image had been overwritten, Tammo Jan Dijkema suggested that I try to recover manually the missing chunk in the recording made on February 27. As you can see, I was successful. This is a report of how I proceeded.
As you may know, I am on a scientific expedition in Antarctica until mid-February. Currently I am in the Spanish base Gabriel de Castilla, where we have relatively good satellite internet access. As I have some free time here, I have updated the DSLWP-B camera planning to reflect the upcoming observations announced by Wei Mingchuan BG2BHC on 2019-02-03 14:30 and 2019-02-04 08:20.
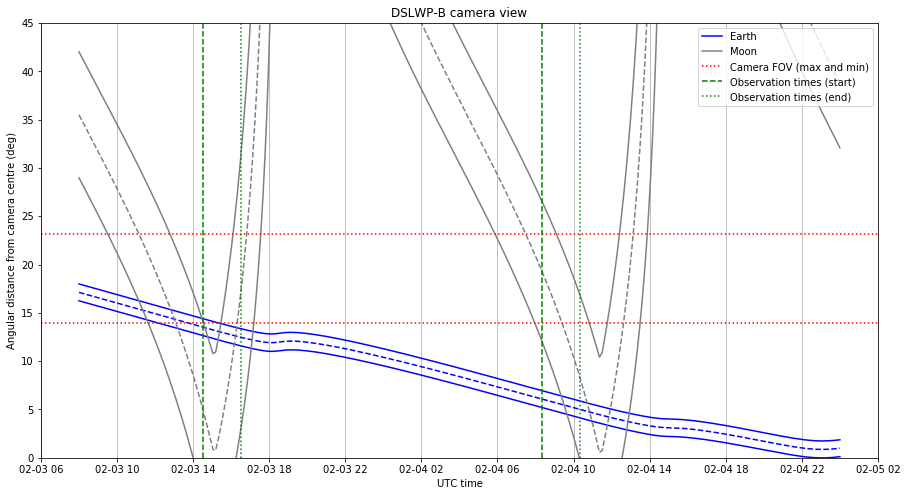
As we can see in the figure below, the Earth will be very near to the centre of the image, since there is a new Moon on February 4 (recall that the DSLWP-B camera points away from the Sun, so the Earth is visible on the camera when there is a new Moon, as the Earth is then opposite to the Sun, as seen from the Moon).
The observation times have been selected taking into account the orbit around the Moon, so that the Moon is also visible on the image. On February 3 the Moon should be completely visible inside the camera field of view. On the contrary, on February 4, the Moon will only be partially visible inside the frame.
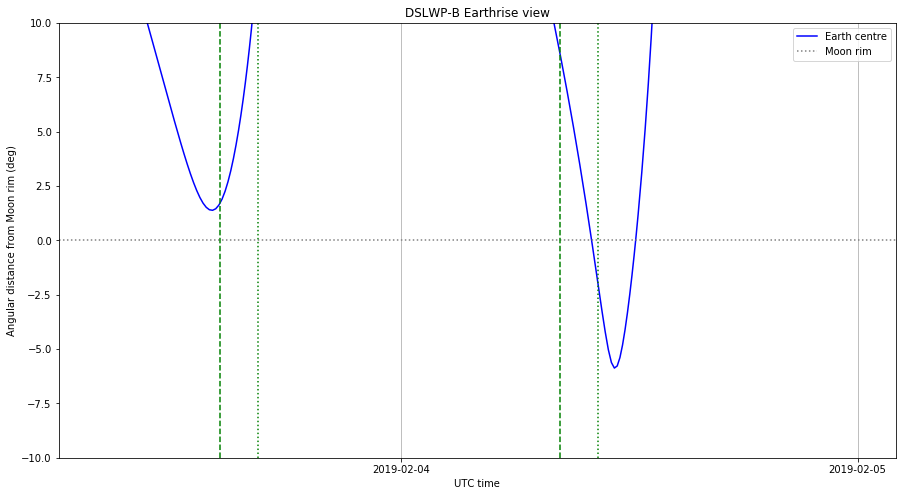
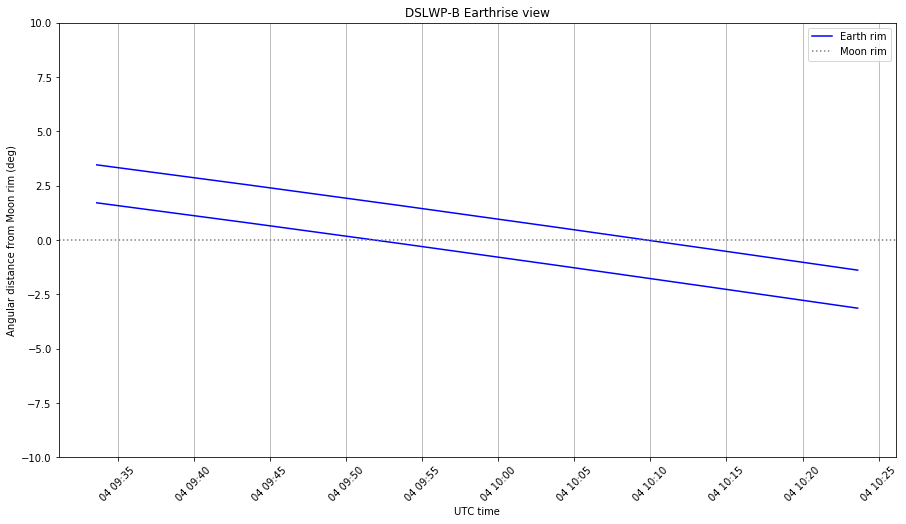
The figure below shows the angular distance between the centre of the Earth and the rim of the Moon. This kind of graph can be used to compute the times when the Earth crosses the Moon rim, allowing us to take an “Earthrise” image. There is an Earthrise event on February 4, during the time when the Amateur payload is active. Generally, an image is taken whenever the Amateur payload powers up, but in this case it could be possible to command the payload manually to take an image near the Earthrise event.
The figure below shows in detail the Earthrise event, with both edges of the Earth plotted. It seems that a good time to take the Earthrise image is on 2019-02-04 10:00 UTC.
It is again the beginning of the month, which means that the Earth will be in view of the Inory eye camera on board DSLWP-B. As usual, I have updated my camera planning notebook to compute the location of the Moon and Earth, as seen from the camera.
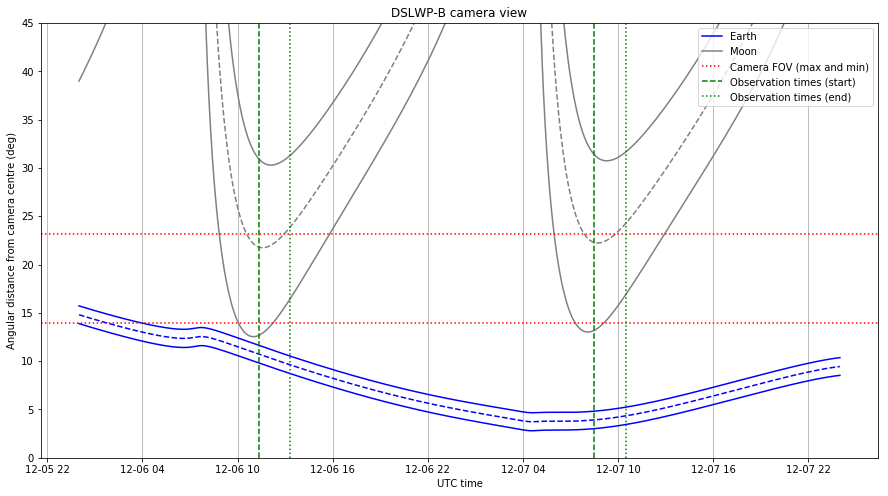
Wei has already scheduled observations on 2018-12-06 11:20 UTC and 2018-12-07 08:30 UTC. On each of these observations, an image will be taken at the start of the observation and the UHF transmitter will be activated for 2 hours.
I have used the 20181128 tracking file from dslwp_dev as orbital state for the calculations. As the date of the observations comes nearer, I might rerun the computations with updated ephemeris data, but this time it doesn’t seem critical to estimate the orbit with precision. In November, there were occultations of the Earth behind the lunar disc, and the times for these depended a lot on the orbital state. In December there will be no occultations, however.
The figure below shows the prediction for the camera view in the scheduled observations. On the 6th, the Earth will come close to the edge of the Moon. On the 7th, the Earth will be closest to the camera centre since we started planning and taking images in October.
However, so far the reflection has been detected by hand by looking at the recording waterfalls. We don’t have any statistics about how often it happens or which conditions favour it. I want to make some scripts to process all the Dwingeloo recordings in batch and try to extract some useful conclusions from the data.
Here I show my first script, which computes the power of the direct and reflected signals (if any). The analysis of the results will be done in a future post.
In previous posts, I have already spoken about the chance of DSLWP-B taking images of the Moon and Earth during the beginning of November. The window to take these images was between November 6 and 9. This window included the possibility of taking an Earthrise image, with the Earth appearing from behind the Moon.
The planning for the activations of the Amateur payload made by Wei Mingchuan BG2BHC was as follows.
7 Nov 2018 08:13 to 7 Nov 2018 10:13 8 Nov 2018 09:40 to 8 Nov 2018 11:40 9 Nov 2018 12:00 to 9 Nov 2018 14:00 10 Nov 2018 14:00 to 10 Nov 2018 16:00 11 Nov 2018 13:30 to 11 Nov 2018 15:30
On November 7, from 8:13 to 9:33 UTC, a total of 9 images with 10 minutes of spacing between each would be taken. These images would be downloaded during the activations on the next days. As usual, an image would also be taken when the Amateur payload powered up on November 8 to 11, but the main focus was on downloading the sequence of images taken on November 7. This is a complete report of the images taken and downloaded.