During this week, the Amateur payload of DSLWP-B has been active on the following slots:
2019-07-09 12:30 to 14:30 UTC
2019-07-10 13:50 to 15:50 UTC
2019-07-12 02:00 to 04:00 UTC
2019-07-12 16:30 to 18:30 UTC
In these activations, the last remaining image of the eclipse was downloaded. Also, images of the lunar surface as well as stars have been taken and downloaded. This post is a summary of the activities made with DSLWP-B over the week.
Now that the DSLWP-B eclipse images have become widespread, appearing even in some newspapers, I have taken the time to identify the features of the lunar surface that can be seen in two of the images. As with any Earth and Moon pictures of DSLWP-B, the part of the Moon that can be seen in these images belongs to the far side, with longitudes of approximately 100º E and 100º W (the division between the near side and the far side happens at 90º E and 90º W, and 0º is the middle of the near side).
I have compared the images with a simulation of the camera view done in GMAT. Using this simulation as a reference and these lunar surface maps as well as Google Moon, I have labelled the features that are visible in the images. The 4K lunar surface map from Celestia Motherlode has been used in GMAT, instead of the default, lower resolution map.
Occultation entry
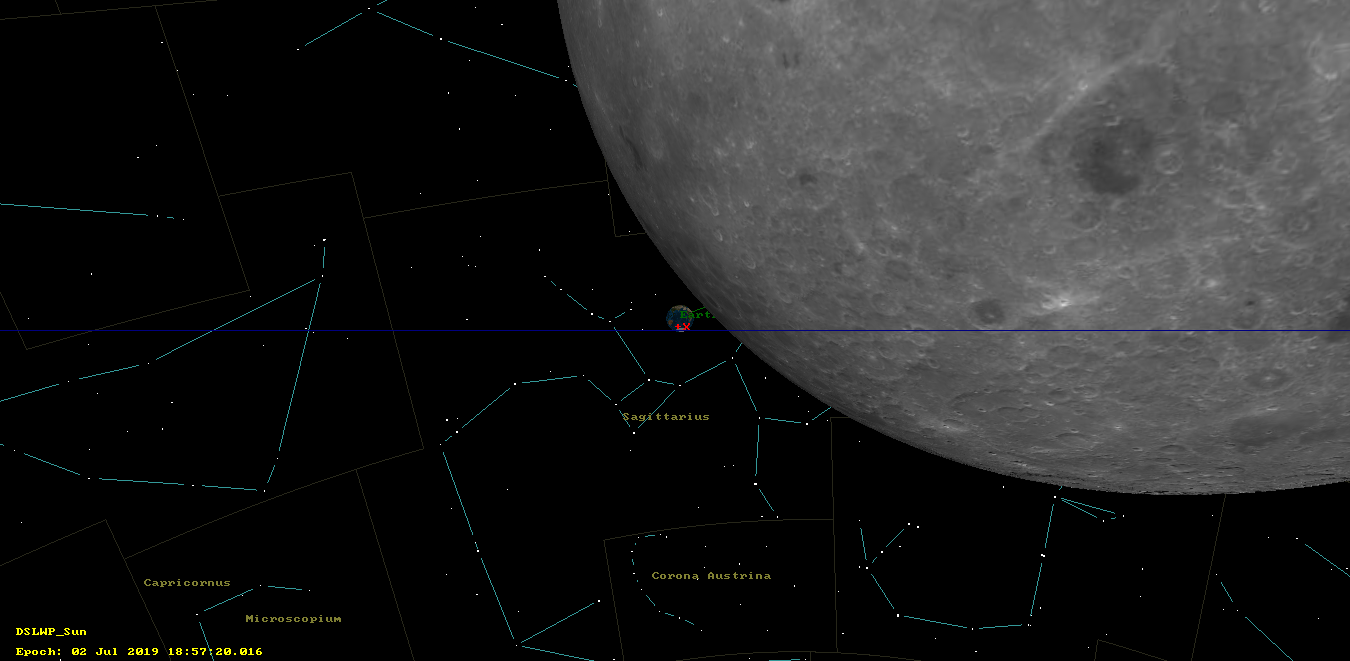
The figure below shows the GMAT camera view simulation for one of the images taken as DSLWP-B was hiding behind the Moon. The field of view in this figure is much larger than the field of view of the DSLWP-B Inory eye camera. The up direction is the normal to DSLWP-B’s orbit around the Sun (defined as the plane containing the position and velocity vectors with DLSWP-B with respect to the Sun). Therefore, it points approximately towards the north pole. DSWLP-B is moving towards the upper right corner of this image.
GMAT camera view simulation for image 0xE2
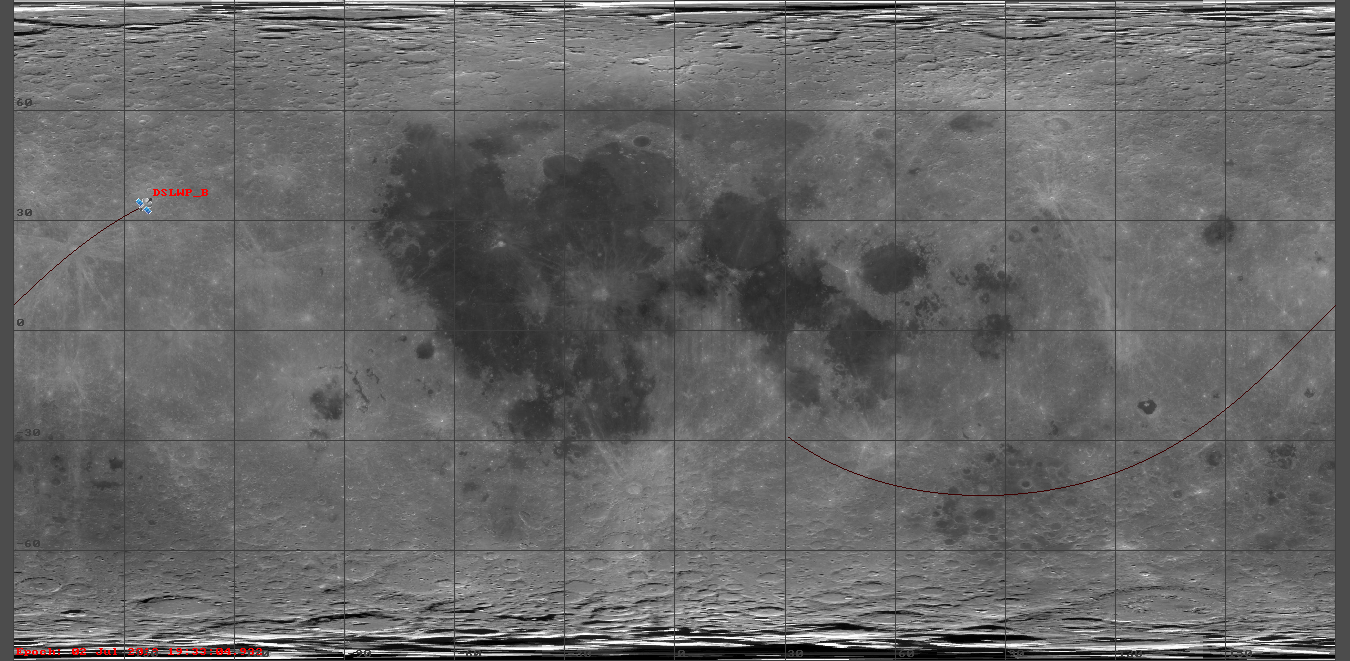
The figure belows shows the ground track view. The satellite has crossed the near side and is now starting to orbit over the far side, soon becoming hidden behind the Moon.
GMAT ground track view for image 0xE2
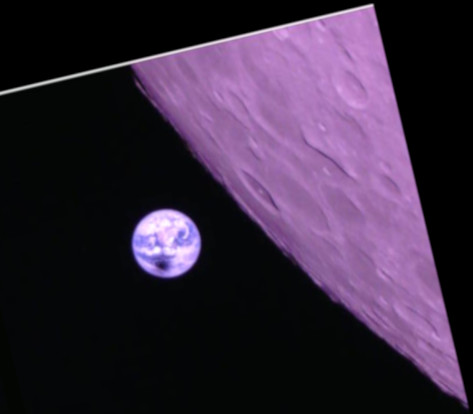
Image 0xE2, taken on 2019-07-02 18:57:20 is shown below. The image has been rotated to match the orientation of the GMAT camera view simulation.
Image 0xE2, rotated
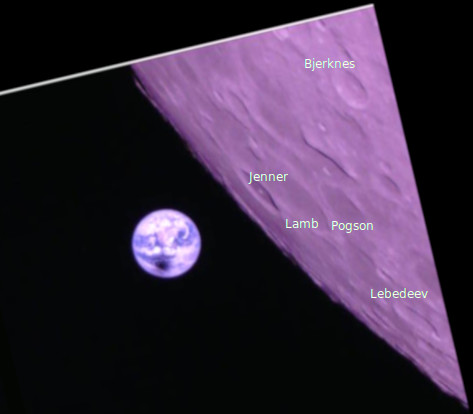
The craters that are visible in this image are labeled in the figure below. These belong to the Mare Australe region, and several well known craters such as Jenner and Lamb can be seen.
Image 0xE2, rotated and labelled
Tammo Jan Dijkema has done a similar exercise with image 0xE3, which was taken a minute after the image shown above. DSLWP-B has moved towards the upper right corner of the image, so that a larger portion of the lunar surface is visible.
Here's the solar eclipse imaged from lunar orbit again, now with some lunar features labeled. These are of course all features on the far side of the Moon. pic.twitter.com/zMY9cxSgZ4
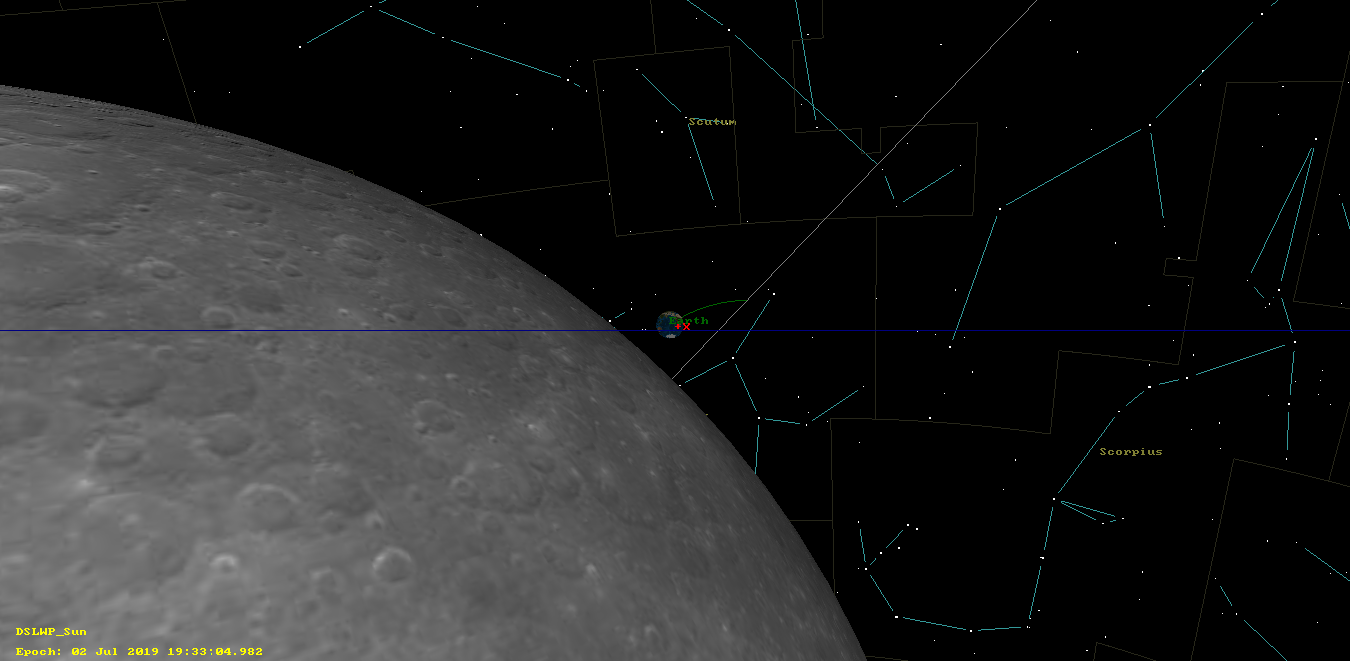
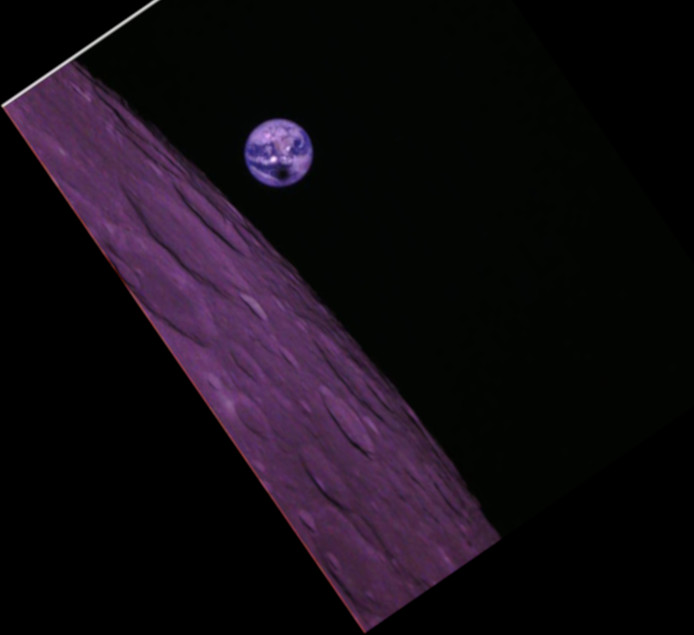
The figure below shows the GMAT camera view simulation corresponding to image 0xE5, which was taken shortly after DSLWP-B exited the occultation, so that the Earth was visible again.
GMAT camera view simulation for image 0xE5
Below we see the ground track corresponding to this image. The satellite has crossed the far side of the Moon in a south to north direction and soon will cross over to the near side.
GMAT ground track view for image OxE5
The figure below is image 0xE5, which was taken on 2019-07-02 19:33:05. It has been rotated to match the orientation of the GMAT simulation.
Image 0xE5, rotated
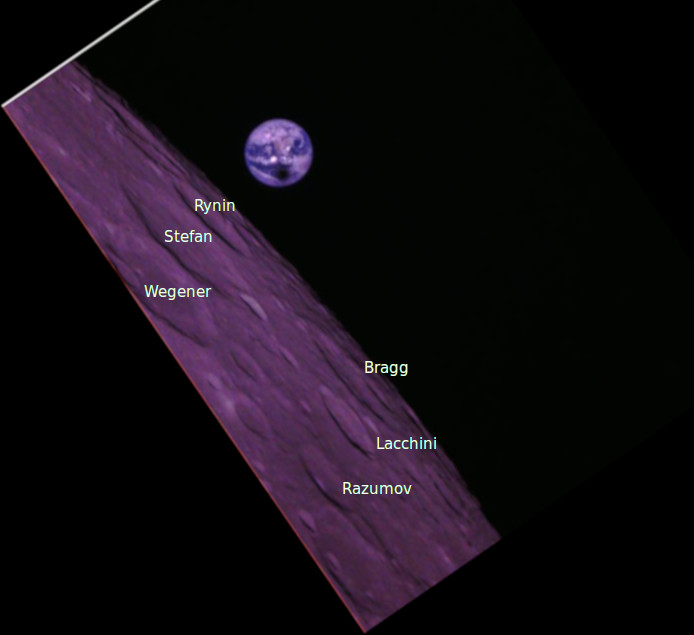
The craters are labelled in the figure below. Important craters in the Coulomb-Sarton basin such as Stefan and Bragg are visible. An image of this region with the craters labelled can be seen here.
I have devoted the lastfewpoststo the planning of the imaging times for the eclipse test run and the validation of the test run done on June 30. This post is a detailed account of the results of the eclipse imaging. Between July 3 and 5, five of the six eclipse images taken on July 2 were downloaded, as well as some other images taken later. Here I give a summary of the downloads during these days and compare the images to the predictions I made.
Yesterday I did an analysis of the image taken and downloaded during the test run for the imaging of the solar eclipse shadow on the Earth with DSLWP-B on July 2. Only one of the six images taken to validate the camera exposure and pointing and orbit errors was downloaded yesterday. The window to download the remaining images was during today’s activation of the Amateur payload between 05:30 and 07:30 UTC.
Three images were downloaded today, with a few missing chunks. Moreover, Wei Mingchuan BG2BHC has sent me better ephemeris, which give a more accurate prediction of the orbit both on the June 30 test run and on the eclipse imaging run on July 2. This post is an analysis of the images downloaded today.
As described in one of my latest posts, today DSLWP-B has made a test imaging run in preparation for the solar eclipse on July 2. A series of images was taken just before the Moon hid the centre of the camera field of view and just after the Moon left the centre of the image, in approximately the same relative positions as for the July 2 eclipse imaging run.
The activation of the Amateur payload started at 05:30 UTC and the payload was commanded to change the configuration of the camera to use 2x zoom. The satellite was occulted by the Moon at 05:40 UTC, preventing the reception of telemetry until it reappeared at 06:16 UTC. The first series of images was taken automatically between 05:51 and 05:54, with the satellite behind the Moon.
After the satellite reappeared from behind the Moon, telemetry confirmed that three images, with IDs 0xD9, 0xDA and 0xDB had been taken. Between 06:29 and and 06:32, the satellite took the second series of images. Telemetry confirmed that these images were taken correctly with IDs 0xDC, 0xDD and 0xDE.
The priority was to use the rest of the activation to download images 0xDA and 0xDD, taken respectively at 05:52:40 and 06:31:10 UTC (when reading the times given in the planning post, note that the times listed there are the moments when the command is sent to the payload by the satellite, but the payload needs about 20 additional seconds to take the image). However, there were difficulties in commanding the payload, so half an hour was lost trying to command the satellite and only image 0xDA could be downloaded before the payload went off at 07:30 UTC.
Image 0xDA was downloaded without errors in a single transmission. It is shown below.
Image 0xDA, taken on 2019-06-30 05:52:40, downloaded between 07:11 ad 07:26
As we see, the exposure of the image is correct, so this image validates that the camera configuration can be used for the eclipse imaging run. Additionally, the image can be used to evaluate camera pointing and ephemeris errors.
As computed in this Jupyter notebook, the separation between the Moon rim and the centre of the field of view in the image shown above is 6.47 degrees. Using the camera calculations Jupyter notebook that I have shown in previous posts, we see that, according to the 20190630 ephemeris from dslwp_dev and my GMAT calculations, the angular distance between the Moon rim and the centre of the image at 05:52:40 UTC should be 3.25 degrees, assuming that the camera points perfectly away from the Sun.
The rate at which the Moon rim moves through the field of view is approximately 0.029 degrees per second. Thus, if the camera was pointing perfectly away from the Sun, this would indicate that DSLWP-B is 110 seconds earlier in its orbit that what predicted by the ephemeris, so that events concerning the relative position of the satellite and the Moon happen 110 seconds later than predicted.
However, one should take these calculations with a grain of salt. In my astrometry post, I showed that the camera was pointing 3.25 degrees off-axis. Therefore, it is convenient to assume an error of +/-3.25 degrees in the angle measurement done with the image. In units of time, this is +/-111 seconds.
So the data seems to suggest that DSLWP-B is one or two minutes earlier in its orbit and that the imaging times should be compensated by making them one or two minutes later, but there is not enough statistical evidence to support this argument. It will be very interesting to see image 0xDD, which will be downloaded tomorrow. The analysis of this image will give additional data.
In any case, so far it seems that orbit and pointing errors are within the tolerance given by the series of three images, which are taken at -1, 0, and +1 minutes offset from the nominal imaging time computed by Wei.
In my last post, I spoke about the possibility of imaging the July 2 solar eclipse using the Inory eye camera on-board DSLWP-B. After discussing the plans for the observations with Wei Mingchuan BG2BHC, we have decided to activate the DSLWP-B Amateur payload during the following intervals:
2019-06-30 05:30 to 07:30
2019-07-01 05:30 to 07:30
2019-07-02 18:00 to 20:00
2019-07-03 06:00 to 08:00
2019-07-04 06:30 to 08:30
2019-07-05 07:30 to 09:30
The camera will be used in 2x zoomed mode, which has a field of view of 14×18.5, degrees. Using the zoomed mode requires careful planning, since part of the Moon needs to appear inside the image, to help the camera auto-exposure algorithm, but the Moon shouldn’t hide the Earth.
The June 30 activation will be used to test the camera, taking images of the Moon in similar positions to those on July 2. The Earth will not be in view of the camera on this day, but these tests will serve to validate camera pointing, exposure, and satellite ephemeris errors.
The following imaging times have been proposed:
2019-06-30 05:51:20
2019-06-30 05:52:20
2019-06-30 05:53:20
2019-06-30 06:29:50
2019-06-30 06:30:50
2019-06-30 06:31:50
2019-07-02 18:56:00
2019-07-02 18:57:00
2019-07-02 18:58:00
2019-07-02 19:31:45
2019-07-02 19:32:45
2019-07-02 19:33:45
The idea for July 2 is to take an image of the Earth and Moon just before the Earth becomes hidden behind the Moon and just after it reappears. Determining these moments accurately is difficult. The Moon will be moving rather fast across the field of view of the camera, since the orbit altitude is rather low. Therefore, the timing of these events is sensitive to the satellite ephemeris and the orbit propagation algorithm. To try to mitigate this effect, we will take a series of three images spaced one minute instead of taking a single image.
On June 30, the same imaging run is mimicked: a series of three images will be taken before the Moon hides the centre of the image (this time the Earth will not be present) and a series of three images will be taken after the centre of the image becomes unblocked again.
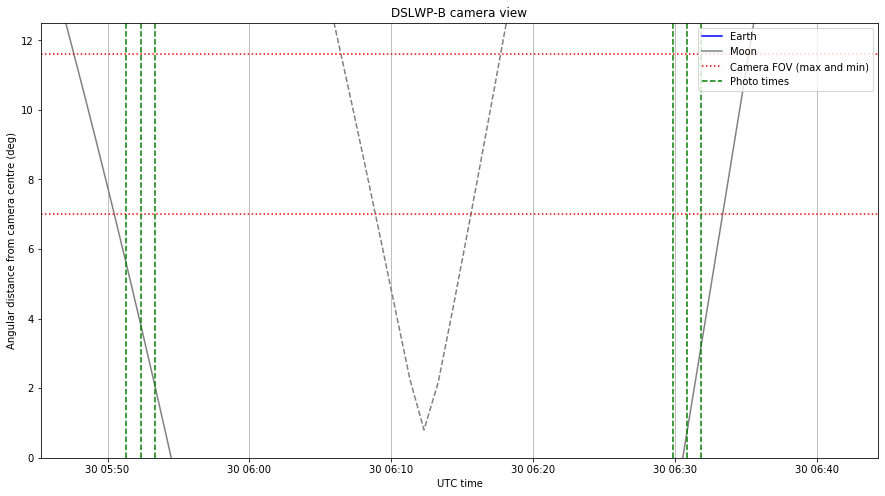
The figure below shows the camera view prediction for the June 30 imaging run. The calculations have been done with the 20190630 ephemeris from dslwp_dev.
We note that the second run of three images seems a little early. Wei is doing his calculations with STK and apparently he is getting slightly different orbital predictions compared to my predictions done in GMAT. We haven’t tried to study these differences, but this gives an idea of how sensitive the imaging times are to ephemeris and orbital propagators. Hopefully the series of three images will account for orbital errors. Additionally, after doing the test run on June 30, the results can be compared with the orbital prediction and the imaging times for July 2 can be modified slightly if necessary.
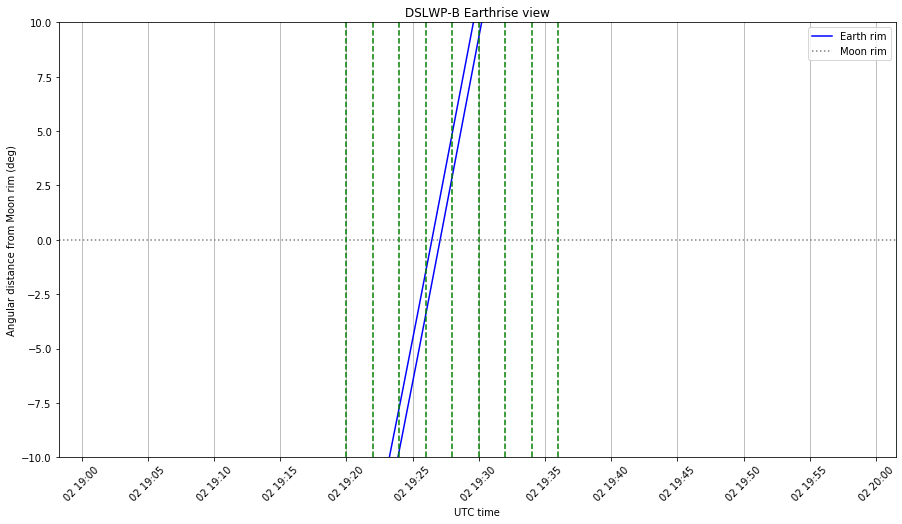
The figure below shows the camera view for the July 2 eclipse imaging run. The 20190630 ephemeris have been used for this plot also. We have the same effect, where the second proposed imaging times seem somewhat early.
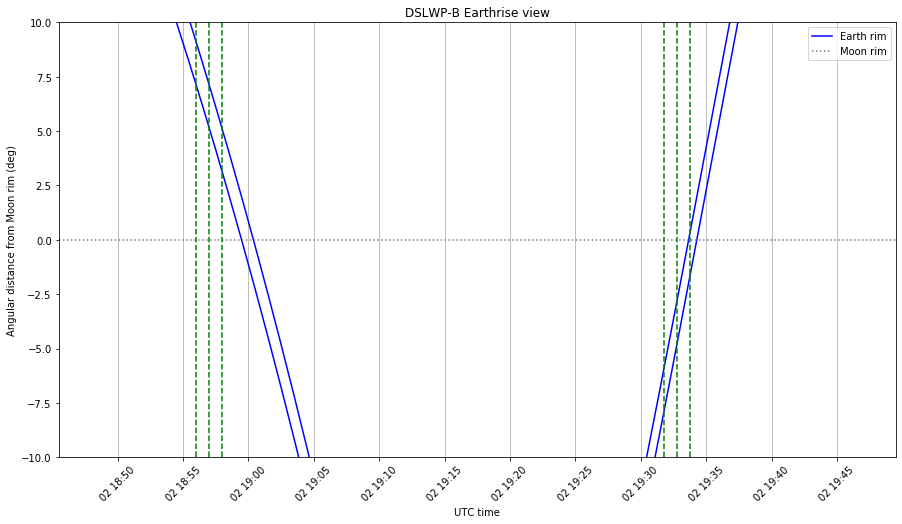
Since this time the Earth is also visible in the image, it is convenient to plot the “Earthrise view” plot, which I have used on other occasions. This shows the angular distance between the Earth and the Moon rim, so it can be used to determine if the the Earth is hidden by the Moon (negative distance) or not.
As we can see below, according to my GMAT prediction, the Earth will not be visible in the images around 19:30. It seems these should be taken a few minutes later. However, Wei has obtained different results with STK. In any case, these imaging times can be corrected based on the results obtained on June 30.
On July 2, there will be a total solar eclipse observable from parts of the Pacific Ocean, Chile and Argentina. This gives the opportunity to image the eclipse with the Inory eye camera on-board DSLWP-B, the Chinese lunar orbiting Amateur satellite. Wei Mingchuan BG2BHC has already started planning for the eclipse observation, and I have run my usual calculations using the 20190618 ephemeris from dlswp_dev.
The main interest in trying to do an imaging session during the eclipse is to photograph the shadow of the Moon on the surface of the Earth. The camera doesn’t have a large resolution, and the Earth looks small in the image, but perhaps it will be possible to distinguish the shadow clearly.
Besides this, it is also interesting to try to get the Moon in the image, as it has been done in other occasions. This not only gives a more interesting picture, but also helps the camera auto-exposure algorithm by providing a large bright object in the field of view. Past attempts to image the Earth alone have all yielded over-exposed images. It turns out that the orbit of DSLWP-B is ideal to image the eclipse, partly by chance and partly because of the nominal satellite attitude.
Recall that the camera of DSLWP-B is always pointing away from the Sun, because the satellite aims its solar panel towards the Sun. Since DSLWP-B orbits the Moon, this means that the Earth will be in the centre of the camera field of view whenever a solar eclipse happens. However, the satellite could be at any point of its orbit. It might happen that the Moon is between the satellite and the Earth, hiding the view, or, more likely, that the Moon is outside of the field of view of the camera.
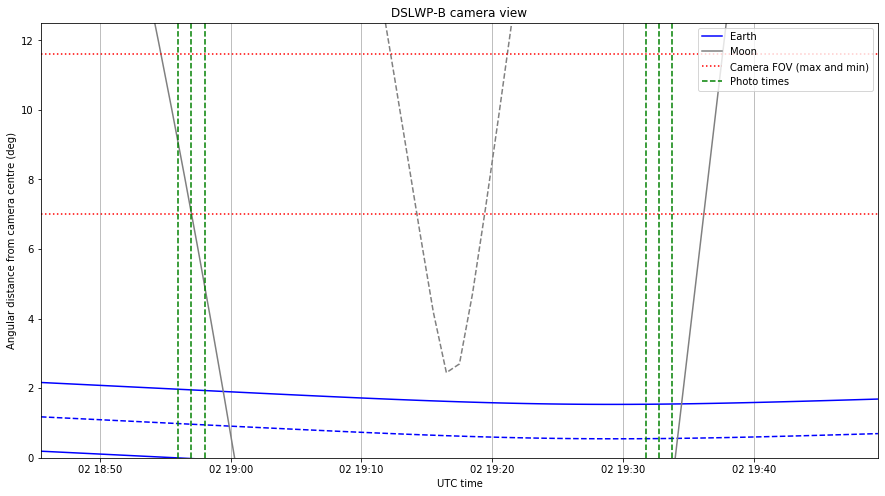
The total eclipse is observable between 18:01 and 20:45 UTC, with the maximum happening at 19:23. The two figures below show the positions of the Moon and Earth within the field of view of the camera. As explained above, the Earth is near the centre of the image during the eclipse. In the bottom figure we see that the Earth is hidden by the Moon until 19:27.
Therefore, it seems that this is an optimal chance to image the eclipse. The Earth will emerge behind the Moon very near to the eclipse maximum. Since DSLWP-B is orbiting at a lower altitude in comparison with other imaging sessions, the Moon will move rather quickly through the camera field of view and disappear in a matter of 10 minutes.
Thus, my recommendation is that instead of taking images every 10 minutes, as it has been done in other occasions, a smaller interval of 2 minutes is used instead. A series of 9 images starting at 19:20 is shown in the plot above as green lines. This gives good coverage of the eclipse and the Earth appearing behind the Moon.
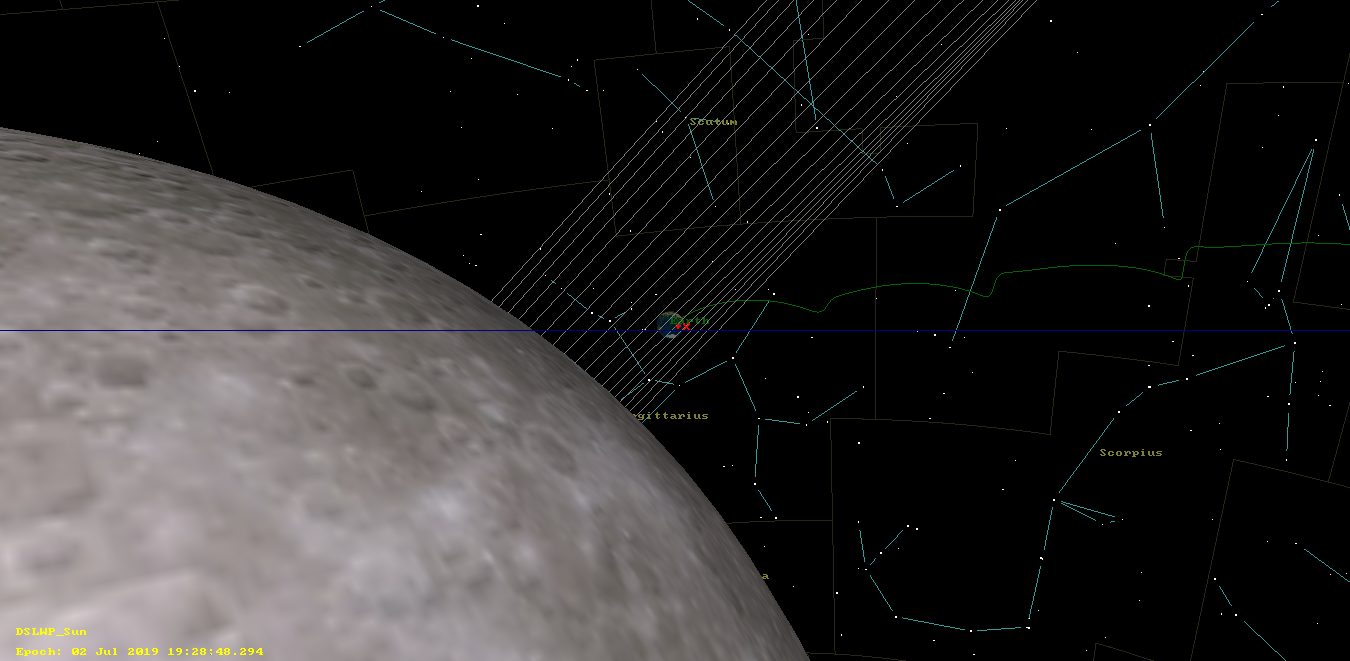
The figure below shows the simulation of the view in GMAT. Note that the field of view of the camera is smaller than what this image shows.
In my last post, I spoke about the images taken by DSLWP-B, the Chinese lunar orbiting Amateur satellite, during the first week of June. One of these images was the picture of stars shown below, taken on 2019-06-07 08:00 UTC.
Image 0xD5, taken on 2019-06-07 08:00, downloaded on 2019-06-07 09:30 – 09:45
Although it may seem that this image is not very interesting in comparison with the other awesome images of the Earth and the Moon, the stars that appear in the image can be used as a reference to compute where the camera was aiming. In a previous post, I used an image of stars to compute the field of view of the camera. In this post, I will assess the accuracy in the camera pointing. Currently, there exist only two images of stars taken by DSLWP-B, so it is interesting to try to study these as much as possible.
In my previous post, I spoke about the opportunity to take images of the Moon and Earth using the Inory eye camera on DSLWP-B during the first week of June. All the tentative plannings for programming the image taking and downloading the images listed in that post were eventually made final, so the observation runs have been done without any modifications to the schedule.
On June 3, a series of 9 images with 10 minutes of spacing was taken starting at 03:05 UTC. This gives a nice sequence of the Earth hiding behind the Moon and reappearing. One of the images was partially downloaded during the same 2 hour activation of the Amateur payload on June 3. Several of the remaining images were downloaded between June 4 and June 6. On June 7, the station of Reinhard Kuehn DK5LA, which is normally used as the uplink station, wasn’t available, so a single image outside of the Moon series was downloaded using Harbin as uplink station.
This is a report of the images taken and downloaded during this week.
Yesterday, Wei Mingchuan BG2BHC sent an email to the team of DSLWP-B collaborators saying that the first week of June would give good opportunities both to take images of the Moon and Earth (as it has been done in other occasions) and to perform VLBI sessions involving Dwingeloo, Shahe, Harbin, and perhaps Wakayama University, which has a 12m dish. Here I show the preliminary plan proposed by Wei and a few graphs useful for camera and VLBI planning.







{kind=link}