Last summer I looked at the demodulation of the 5G NR downlink, using a short recording of an idle srsRAN gNB made by Benjamin Menkuec. In that post I looked at the phase compensation, which is new in NR compared to LTE, the SS/PBCH block, and performed OFDM demodulation of all the signals in the recording. One of these signals was the PDSCH transmitting the SIB1 (which is done periodically even on an idle cell), and its corresponding PDCCH transmission. However, there were some reference signals that I wasn’t able to identify at the time. In this post I will look at these reference signals in detail, and also to the DM-RS (demodulation reference signal) in the PDCCH and PDSCH.
Category: Amateur radio
Trying to decode LEV-1
LEV-1 is a small lunar hopper that was carried by the SLIM lunar lander. It was released a few metres above the surface on January 19, as part of the lunar landing of SLIM. LEV-1 transmits telemetry in the 435 MHz amateur satellite band (it has an IARU satellite coordination approval), and also in S-band. Shortly after the landing, CAMRAS received the 437.410 MHz signal from LEV-1 using the 25 m radiotelescope at Dwingeloo. They have published a couple of IQ recordings in their directory of miscellaneous recordings (see the filenames starting by slim_).
The information about the telemetry signal of LEV-1 is scarce. Its website just says
Telemetry format of LEV-1 stands on CCSDS. The contents of telemetry are under developing.
The IARU coordination sheet contains other clues, such as the mention of PCM/PSK/PM, CW, and bitrates of 31, 31.25 and 32 bps, but not much else. Regardless of the mention of CCSDS, I have found that the signal from LEV-1 is quite peculiar. This post is an account of my attempt to decode the data.
Decoding MOVE-II
MOVE-II is a cubesat from Technical University of Munich that was launched in December 2018. It transmits telemetry in the 145 MHz amateur satellite band using a protocol that uses CCSDS LDPC codewords. Back in the day, there was a GNU Radio out-of-tree module developed by the satellite team to decode this satellite. Given the additional effort required to support LDPC decoding for just this satellite and since there was already a GNU Radio decoder available, I never added a decoder for MOVE-II to gr-satellites.
Fast forward 5 years, and MOVE-II is still active, but apparently its GNU Radio out-of-tree module has bit rotten. The Gitlab repository where this was hosted (I believe it was a self-hosted Gitlab) has disappeared, and while it was originally developed for GNU Radio 3.7, it was never ported to newer GNU Radio versions. Some days ago, some amateurs including Scott Chapman K4KDR and Bob Mattaliano N6RFM started doing some experiments to try to get a decoder for MOVE-II working.
Seeing this, I decided to revisit the situation and try to add a decoder for MOVE-II to gr-satellites. Since this satellite was launched, I have been dealing with CCSDS LDPC for the Artemis Orion, made my own LDPC decoder, and participated in fixing the GNU Radio in-tree LDPC decoder. Therefore, most of the heavy lifting seemed to be already done.
I have now added an example decoder flowgraph for MOVE-II to gr-satellites. Here I describe the details of this example, and why it is only an example instead of a fully supported decoder as the ones that exist for other satellites.
Receiving HADES-D
HADES-D is the 9th PocketQube developed by AMSAT-EA. It is the first one that hasn’t failed early in the mission. Among the previous AMSAT-EA satellites, GENESIS-L and -N suffered the launch failure of the Firefly-Alpha maiden flight, EASAT-2 and HADES presumably failed to deploy their antennas, GENESIS-G and -J flew on the second Firefly-Alpha flight, which only achieved a short-lived orbit, with all the satellites reentering in about a week, URESAT-1 had the same kind of antenna deployment problem, and GENESIS-A is a short duration payload scheduled to fly in the Ariane-6 maiden flight, which hasn’t happened yet.
HADES-D launched with the SpaceX Transporter 9 rideshare on November 11. This PocketQube was carried in the ION SCV-013 vehicle, and was released on November 28. The antennas have been deployed correctly, unlike in its predecessors, the satellite is in good health, and several amateur stations have been able to receive it successfully, so congratulations to AMSAT-EA.
Since HADES-D is the first PocketQube from AMSAT-EA that is working well, I was curious to measure the signal strength of this satellite. Back around 2016 I was quite involved in the early steps of AMSAT-EA towards their current line of satellites. We did some trade-offs between PocketQube and cubesat sizes and calculated power budgets and link budgets. Félix Páez EA4GQS and I wanted to build an FM repeater amateur satellite, because that suited best the kind of portable satellite operations with a handheld yagi that we used to do back then. Using a PocketQube for this always seemed a bit of a stretch, since the power available wasn’t ample. In fact, around the time that PocketQubes were starting to appear, some people were asking if this platform could ever be useful for any practical application.
Fast forward to the end of 2023 and we have HADES-D in orbit, with a functioning FM repeater. My main interest in this satellite is to gather more information about these questions. I should say that I was only really active in AMSAT-EA’s projects during 2016. Since then, I have lost most of my involvement, only receiving some occasional informal updates about their work.
An annotated 5G SigMF recording
For quite some time I’ve been thinking about generating SigMF annotations in some of the Jupyter notebooks I have about signal analysis, such as those for LTE and 5G NR. The idea is that the information about the frequencies and timestamps of the packets, as well as their type and other metadata, is already obtained in the notebook, so it is not too difficult to generate SigMF annotations with this information. The main intention is educational: the annotated SigMF file provides a visual guide that helps to understand the signal structure, and it also serves as a summary of what kind of signal detection and analysis is done in the Jupyter notebook. The code also serves as an example of how to generate annotations.
Another benefit of this idea is that it serves as a good test case for applications that display SigMF annotations. It shows what kinds of limitations the current tools have, and can also motivate new features. I’ve been toying with this idea since a while ago, but never wrote a blog post about it before. A year ago I sent a pull request to Inspectrum to be able to display annotation comments as tooltips when the mouse hovers above the annotation. While doing some tests with one LTE recording I realized that a feature like this was necessary to display any kind of detailed information about a packet. Back then, Inspectrum was the only application that was reasonably good at displaying SigMF annotations in a waterfall. Later, IQEngine has appeared as another good tool to display SigMF annotations (and also add them manually).
I have now updated the Jupyter notebook that I used to process a 5G NR downlink recording made by Benjamin Menkuec. This is much better to show an example of what I have in mind compared to the LTE recordings I was playing with before. The recording is quite short (so it is small), and I already have code to detect all the “packets”, although I have not been able to identify what kind of signals some of them are.
ssdv-fec: an erasure FEC for SSDV implemented in Rust
Back in May I proposed an erasure FEC scheme for SSDV. The SSDV protocol is used in amateur radio to transmit JPEG files split in packets, in such a way that losing some packets only cases the loss of pieces of the image, instead of a completely corrupted file. My erasure FEC augments the usual SSDV packets with additional FEC packets. Any set of \(k\) received packets is sufficient to recover the full image, where \(k\) is the number of packets in the original image. An almost limitless amount of distinct FEC packets can be generated on the fly as required.
I have now written a Rust implementation of this erasure FEC scheme, which I have called ssdv-fec. This implementation has small microcontrollers in mind. It is no_std (it doesn’t use the Rust standard library nor libc), does not perform any dynamic memory allocations, and works in-place as much as possible to reduce the memory footprint. As an example use case of this implementation, it is bundled as a static library with a C-like API for ARM Cortex-M4 microcontrollers. This might be used in the AMSAT-DL ERMINAZ PocketQube mission, and it is suitable for other small satellites. There is also a simple CLI application to perform encoding and decoding on a PC.
BSRC REU GNU Radio tutorial recordings
Since 2021 I have been collaborating with the Berkeley SETI Research Center Breakthrough Listen Summer Undergraduate Research Experience program by giving some GNU Radio tutorials. This year, the tutorials have been recorded and they are now available in the BSRC Tech YouTube channel (actually they have been there since the end of August, but I only realized just now).
These tutorials are intended as an introduction to GNU Radio and SDR in general, focusing on topics and techniques that are related or applicable to SETI and radio astronomy. They don’t assume much previous background, so they can also be useful for GNU Radio beginners outside of SETI. Although each tutorial builds up on concepts introduced in previous tutorials, their topics are reasonably independent, so if you have some background in SDR you can watch them in any order.
All the GNU Radio flowgraphs and other materials that I used are available in the daniestevez/reu-2023 Github repository. Below is a short summary of each of the tutorials.
DVB-S2 GRCon23 CTF challenge
This year I submitted a challenge track based around a DVB-S2 signal to the GRCon CTF (see this post for the challenges I sent in 2022). The challenge description was the following.
I was scanning some Astra satellites and found this interesting signal. I tried to receive it with my MiniTiouner, but it didn’t work great. Maybe you can do better?
Note: This challenge has multiple parts, which can be solved in any order. The flag format is
flag{...}.
A single SigMF recording with a DVB-S2 signal sampled at 2 Msps at a carrier frequency of 11.723 GHz was given for the 10 flags of the track. The description and frequency were just some irrelevant fake backstory to introduce the challenge, although some people tried to look online for transponders on Astra satellites at this frequency.
The challenge was inspired by last year’s NTSC challenge by Clayton Smith (argilo), which I described in my last year’s post. This DVB-S2 challenge was intended as a challenge with many flags that can be solved in any order and that try to showcase many different places where one might sensibly put a flag in a DVB-S2 signal (by sensibly I mean a place that is actually intended to transmit some information; surely it is also possible to inject flags into headers, padding, and the likes, but I didn’t want to do that). In this sense, the DVB-S2 challenge was a spiritual successor to the NTSC challenge, using a digital and modern TV signal.
Another source of motivation was one of last year’s Dune challenges by muad’dib, which used a DVB-S2 Blockstream Satellite signal. In that case demodulating the signal was mostly straightforward, and the fun began once you had the transport stream. In my challenge I wanted to have participants deal with the structure of a DVB-S2 signal and maybe need to pull out the ETSI documentation as a help.
I wanted to have flags of progressively increasing difficulty, keeping some of the flags relatively easy and accessible to most people (in any case it’s a DVB-S2 signal, so at least you need to know which software tools can be used it to decode it and take some time to set them up correctly). This makes a lot of sense for a challenge with many flags, and in hindsight most of the challenges I sent last year were quite difficult, so I wanted to have several easier flags this time. I think I managed well in this respect. The challenge had 10 flags, numbered more or less in order of increasing difficulty. Flags #1 through #8 were solved by between 7 and 11 teams, except for flag #4, which was somewhat more difficult and only got 6 solves. Flags #9 and #10 were significantly more difficult than the rest. Vlad, from the Caliola Engineering LLC team, was the only person that managed to get flag #10, using a couple of hints I gave, and no one solved flag #9.
When I started designing the challenge, I knew I wanted to use most of the DVB-S2 signal bandwidth to send a regular transport stream video. There are plenty of ways of putting flags in video (a steady image, single frames, audio tracks, subtitles…), so this would be close to the way that people normally deal with DVB-S2, and give opportunities for many easier flags. I also wanted to put in some GSE with IP packets to show that DVB-S2 can also be used to transmit network traffic instead of or in addition to video. Finally, I wanted to use some of the more fancy features of DVB-S2 such as adaptive modulation and coding for the harder flags.
To ensure that the DVB-S2 signal that I prepared was not too hard to decode (since I was putting more things in addition to a regular transport stream), I kept constantly testing my signal during the design. I mostly used a Minitiouner, since perhaps some people would use hardware decoders. I heard that some people did last year’s NTSC challenge by playing back the signal into their hotel TVs with an SDR, and for DVB-S2 maybe the same would be possible. Hardware decoders tend to be more picky and less flexible. I also tested gr-dvbs2rx and leandvb to have an idea of how the challenge could be solved with the software tools that were more likely to be used.
What I found, as I will explain below in more detail, is that the initial way in which I intended to construct the signal (which was actually the proper way) was unfeasible for the challenge, because the Minitiouner would completely choke with it. I also found important limitations with the software decoders. Basically they would do some weird things when the signal was not 100% a regular transport stream video, because other cases were never considered or tested too thoroughly. Still, the problems didn’t get too much in the way of getting the video with the easier flags, and I found clever ways of getting around the limitations of gr-dvbs2rx and leandvb to get the more difficult flags, so I decided that this was appropriate for the challenge.
In the rest of this post I explain how I put together the signal, the design choices I made, and sketch some possible ways to solve it.
Demodulation of the 5G NR downlink
At the end of July, Benjamin Menkuec was commenting in Twitter about some issues he had while demodulating a 5G NR downlink recording. There was a lively discussion in which other people and I participated. I had never touched 5G, but had done some work with LTE, so I decided to take the chance to learn more about the 5G physical layer. Compared to LTE, the changes are more evolutionary than revolutionary, but understanding what has changed, and how and why, is part of the puzzle.
I had to take an 11.5 hour flight in a few days, so I thought it would be a nice challenge to give this a shot, take with me the recordings that Benjamin was using and all the 3GPP documents, and write a demodulator in a Jupyter notebook from scratch during the flight, as I had done in the past with my LTE recordings. This turned out to be an enjoyable and interesting experience, quite different from working at home in shorter intervals scattered over multiple days or weeks, and with internet access. At the end of the flight I had a mostly working demodulation, but it had a few weird problems that turned out to be caused by some mistakes and misconceptions. I worked on cleaning this up and solving the problems over the next few days, and also now preparing this post.
Rather than trying to give an account of all my mistakes and dead ends (I spoke a little about these in Twitter), in this post I will show the final clean solution. There are some tricky new aspects in 5G NR (phase compensation, as we will see below) which can be quite confusing, so hopefully this post will do a good job at explaining them in a simple way.
The Jupyter notebook used in this post is here, and the recording in SigMF format can be found in this folder. Here I will only be using the first of Benjamin’s two recordings, since they are quite similar. It was done with an ADALM Pluto at 7.86 Msps and has a duration of 143 ms. The transmitter is an srsRAN 5 MHz cell. The recording was done off-the-air, or maybe with a cabled set up, but there are some other signals leaking in. The SNR is very good, so this is not a problem.
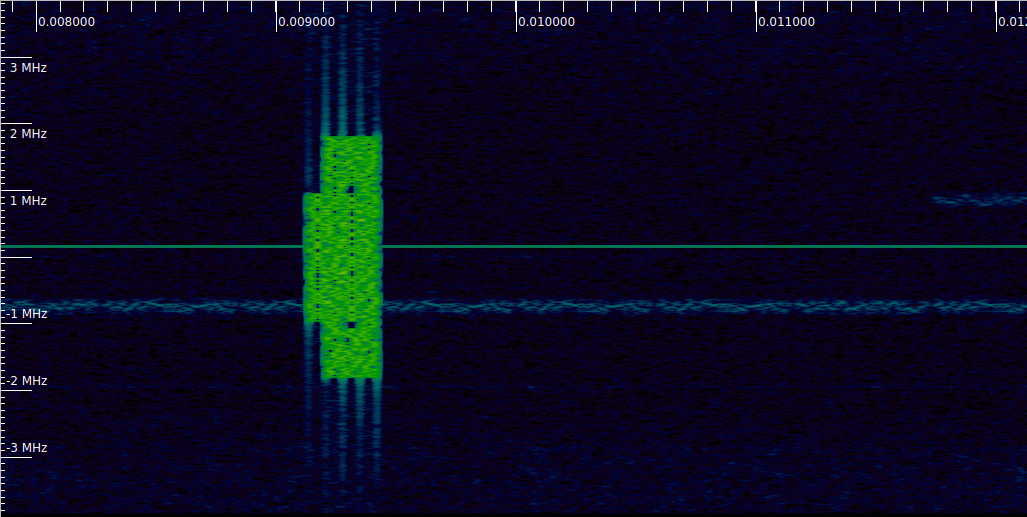
The first signal we find is at 9 ms. There is a transmission like this every 10 ms. As we will see, this is an SS/PBCH block. Something that stands out to those familiar with the LTE downlink spectrum is that the 5G NR spectrum is almost empty. In LTE, the cell-specific reference signals are transmitted all the time. In 5G this is not the case. Downlink signals are transmitted only when there is traffic. There is always a burst of one or several SS/PBCH blocks transmitted periodically (usually every 20 ms, but in this recording every 10 ms), as well as other signals that are always sent periodically (such as the SIB1 in the PDSCH), but this may be all if there is no traffic in the cell.
A very quick RFI survey at the Allen Telescope Array
At the beginning of August I visited the Allen Telescope Array (ATA) for the Breakthrough Listen REU program field trip (I have been collaborating with the REU program for the past few years). One of the things I did during my visit was to use an ADALM Pluto running Maia SDR to do a very quick scan of the radio frequency interference (RFI) on-site. This was not intended as a proper study of any sort (for that we already have the Hat Creek Radio Observatory National Dynamic Radio Zone project), but rather as a spoor-of-the-moment proof of concept.
The idea was to use equipment I had in my backpack (the Pluto, a small antenna, my phone and a USB cable), step just outside the main office, scroll quickly through the spectrum from 70 MHz to 6 GHz, stop when I saw any signals (hopefully not too many, since Hat Creek Radio Observatory is supposed to be a relatively quiet radio location), and make a SigMF recording of each of the signals I found. It took me about 15 minutes to do this, and I made 6 recordings in the process. A considerable amount of time was spent downloading the recordings to my phone, which takes about one minute per recording (since recordings are stored on the Pluto DDR, only one recording can be stored on the Pluto at a time, and it must be downloaded to the phone before making a new recording).
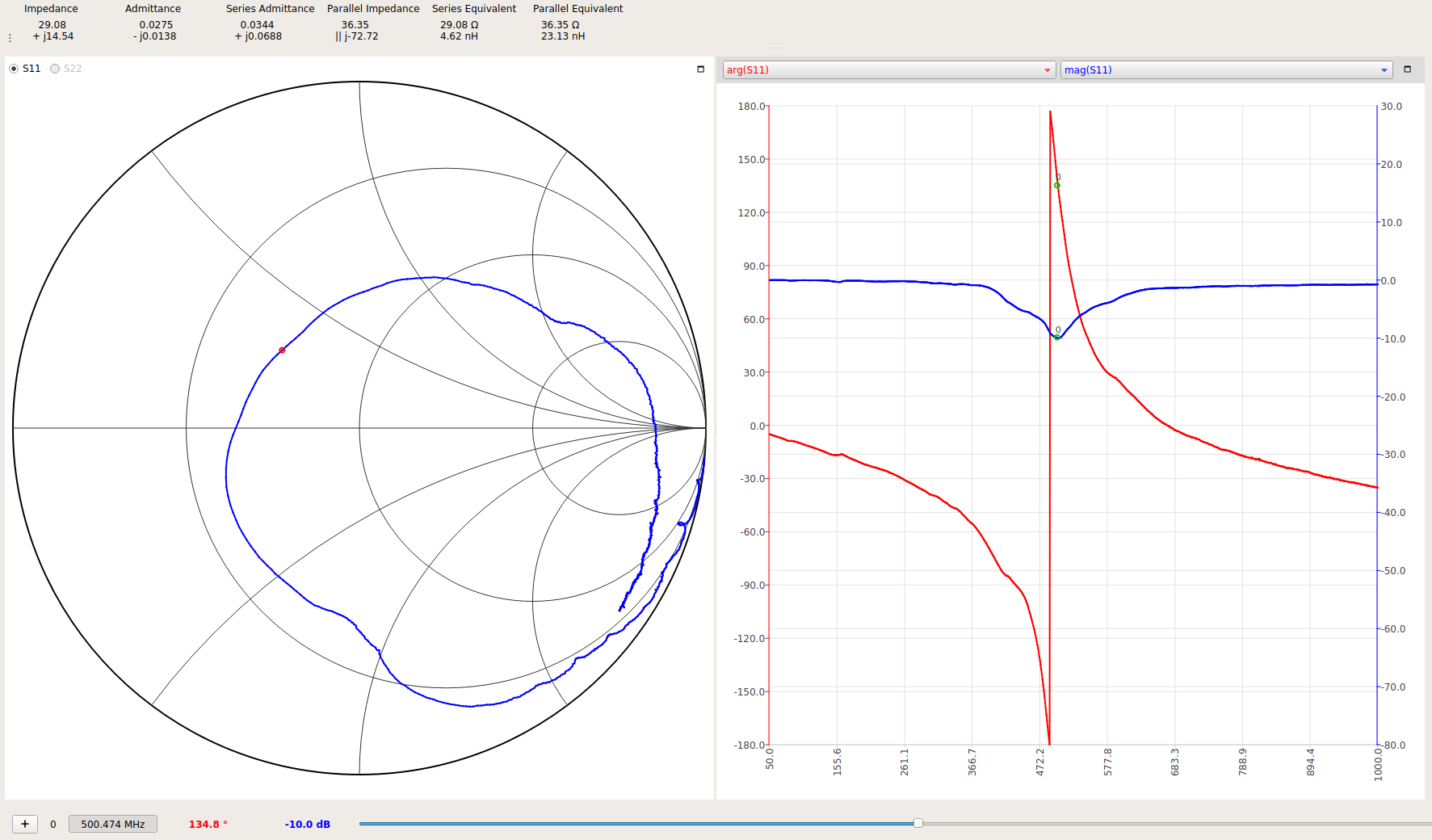
This shows that Maia SDR can be a very effective tool to get a quick idea of how the local RF environment looks like, and also to hunt for local RFI in the field, since it is quite easy to carry around a Pluto and a phone. The antenna I used was far from ideal: a short monopole for ~450 MHz, shown in the picture below. This does a fine job at receiving strong signals regardless of frequency, but its sensitivity is probably very poor outside of its intended frequency range.

The following plot shows the impedance of the antenna measured with a NanoVNA V2. The impedance changes noticeably if I put my hand on the NanoVNA, with the resonant peak shifting down in frequency by 50 to 100 MHz. Therefore, this measurement should be taken just as a rough ballpark of how the antenna looks like on the Pluto, which I was holding with my hand.
As the antenna I used for this survey is pretty bad, the scan will only show signals that are actually very strong on the ATA dishes. The log-periodic feeds on the ATA dishes tend to pick up signals that do not bounce off the dish reflectors, and instead arrive to the feed directly from a side. This is different from a waveguide type feed, in which signals need to enter through the waveguide opening. Therefore, besides having the main lobe corresponding to a 6.1 m reflector, the dishes also have relatively strong sidelobes in many directions, with a gain roughly comparable to an omnidirectional antenna. The system noise temperature of the dishes is around 100 to 150 K (including atmospheric noise and spillover), while the noise figure of the Pluto is probably around 5 dB. This all means that the dishes are more sensitive to detect signals from any direction that the set up I was using. In fact, signals from GNSS satellites from all directions can easily be seen with the dishes several dB above the noise floor, but not with this antenna and the Pluto.
Additionally, the scan only shows signals that are present all or most of the time, or that I just happened to come across by chance. This quick survey hasn’t turned up any new RFI signals. All the signals I found are signals we already knew about and have previously encountered with the dishes. Still, it gives a good indication of what are the strongest sources of RFI on-site. Something else to keep in mind is that the frequency range of the Allen Telescope Array is usually taken as 1 – 12 GHz. Although the feeds probably work with some reduced performance somewhat below 1 GHz, observations are done above 1 GHz. Therefore, none of the signals I have detected below 1 GHz are particularly important for the telescope observations, since they are not strong enough to cause out-of-band interference.
I have published the SigMF recordings in the Zenodo dataset Quick RFI Survey at the Allen Telescope Array. All the recordings have a sample rate of 61.44 Msps, since this is what I was using to view the largest possible amount of spectrum at the same time, and a duration of 2.274 seconds, which is what fits in 400 MiB of the Pluto DDR when recording at 61.44 Msps 12 bit IQ (this is the maximum recording size for Maia SDR). The published files are as produced by Maia SDR. At some point it could be interesting to add additional metadata and annotations.
In the following, I do a quick description of each of the 6 recordings I made.