As probably you all know, the Chinese Amateur lunar orbiting satellite DSLWP-B was expected to collide with the Moon on July 31 at 14:20 UTC, so this is the last report about the DSLWP-B activities. The collision was planned since January this year, and was done as a means to end the mission without leaving debris in lunar orbit.
The activation slots for the Amateur payload on-board DSLWP-B for this week were the following:
29 Jul 00:15 to 02:15
29 Jul 04:30 to 06:30
29 Jul 20:00 to 22:00
30 Jul 05:30 to 07:30
30 Jul 16:20 to 18:20
31 Jul 06:30 to 08:30
31 Jul 13:24 to 15.24
1 Aug 05:30 to 07:30
I had calculated a periapsis height of -62km for the July 31 orbit, so the collision with the Moon was quite certain, even taking orbit errors into account. However, a slot was set on August 1 just in case the collision didn’t happen.
This post summarizes the activities done this week with DSLWP-B and the end of the mission.
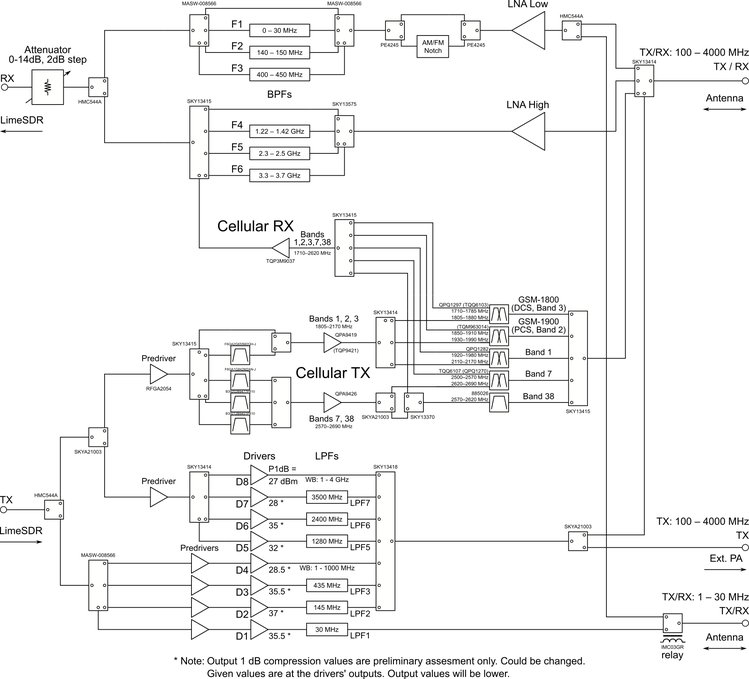
The LimeRFE is intended to work as an RF frontend for the LimeSDR family, although it can work coupled with any other SDR or conventional radio. As such, it has power amplifiers, filters and LNAs designed to cover the huge frequency range of these SDRs. It is designed to cover all the Amateur radio bands from HF up to 9cm, and a few cellular bands.
As anyone will know, designing broadband RF hardware is often quite difficult or expensive (Amateur radio amplifiers and LNAs are usually designed for a single band), so packing all this into a single unit is a considerable feat. The output power on most bands is around a couple watts, which is already enough for many experiments and applications. The block diagram of the LimeRFE can be seen below.
LimeRFE block diagram
In this post I show a brief overview of the LimeRFE and demonstrate its HF transmission capabilities by showing a WSPR transmitter in the 10m band, using a LimeSDR as the transmitter.
During the fourth week of July, the Amateur payload on-board DSLWP-B was active in the following slots.
22 Jul 06:14 to 08:14
22 Jul 22:40 to 23 Jul 00:40
23 Jul 23:20 to 24 Jul 01:20
25 Jul 00:30 to 02:30
26 Jul 10:55 to 12:55
27 Jul 02:30 to 04:30
28 Jul 03:30 to 05:30
Additionally, Wei Mingchuan BG2BHC shared on Twitter the 10 minute slots for the activations of the X band transmitter. This transmitter uses a frequency of 8478MHz (in the Deep Space X band) and 2Mbps BPSK with CCSDS standards. The transmit power is 2W and the gain of the small X-band dish is 22dBi. The signal is detectable with small stations (as shown here), but to demodulate the data a large dish is needed. The Chinese DSN uses 35m and 50m antennas to receive this signal.
Back in May, I spoke about the future collision of DSLWP-B with the lunar surface. It would happen on July 31, thus putting and end to the mission. Now that the impact date is near, I have run again the calculations with the latest ephemeris in order to have an accurate simulation of the event.
The ephemeris I’m using consist of a Moon centred ICRF Keplerian state vector which has been shared by Wei Mingchuan BG2BHC. In GMAT, this state vector is as follows:
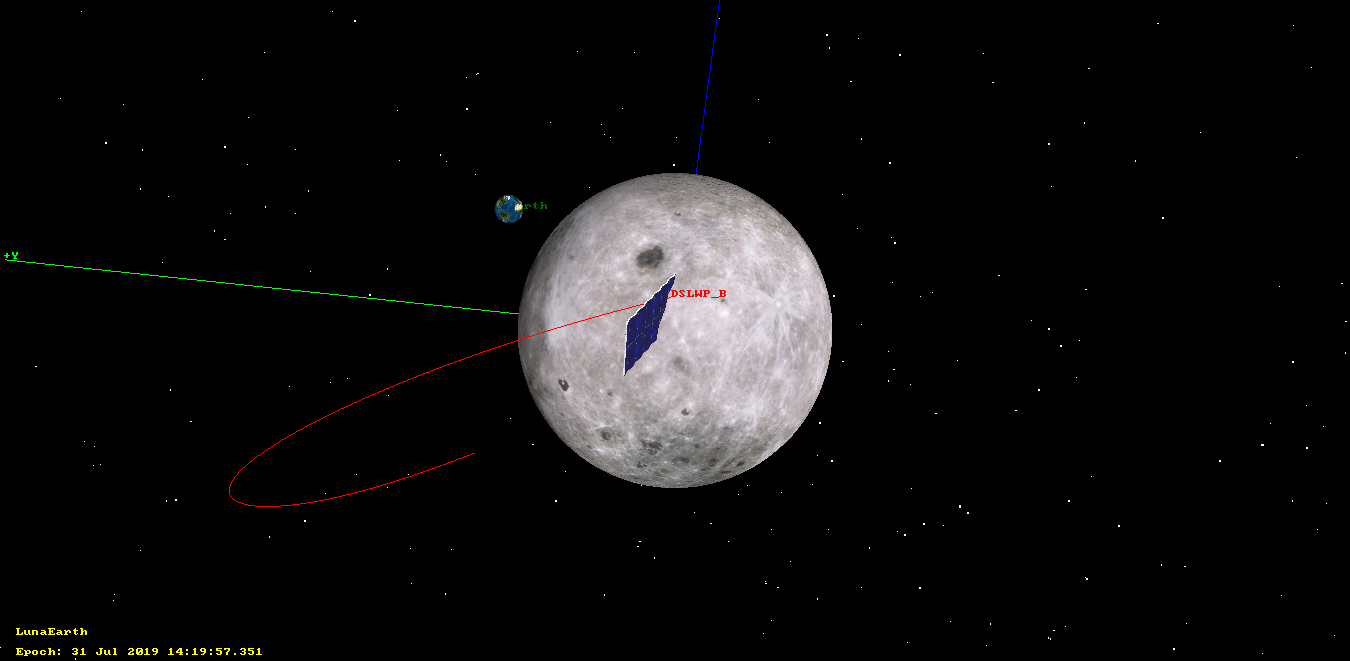
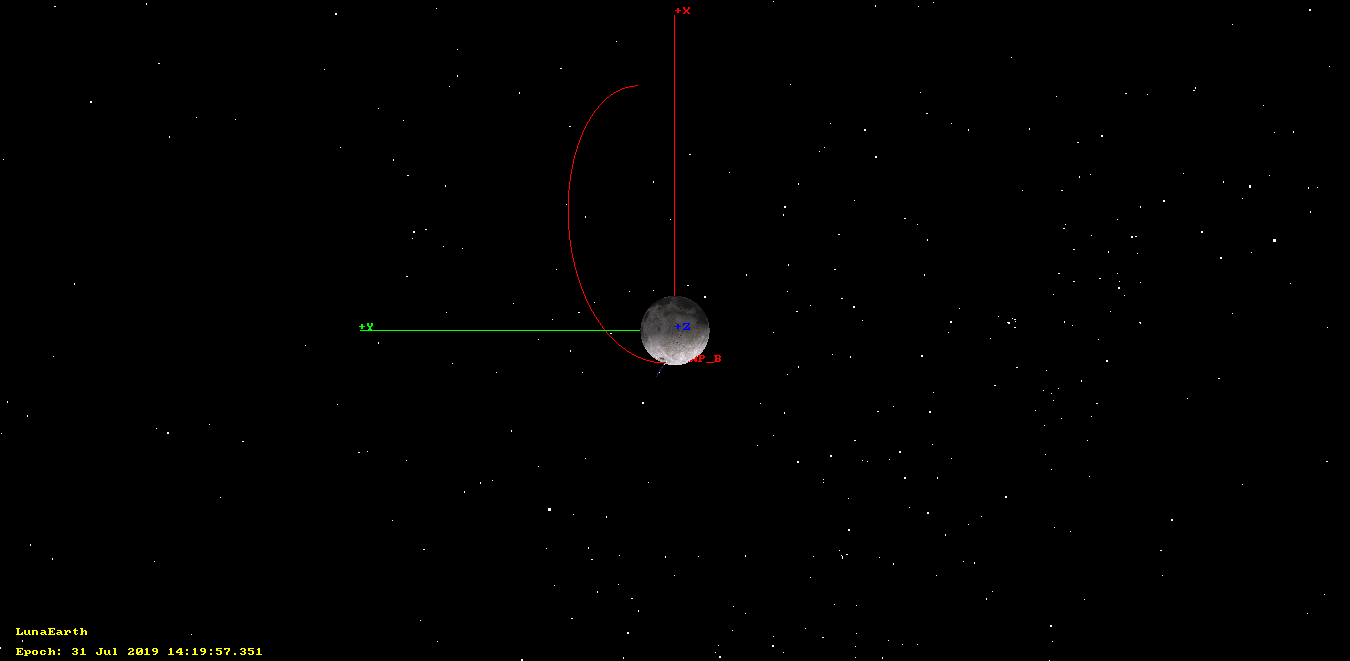
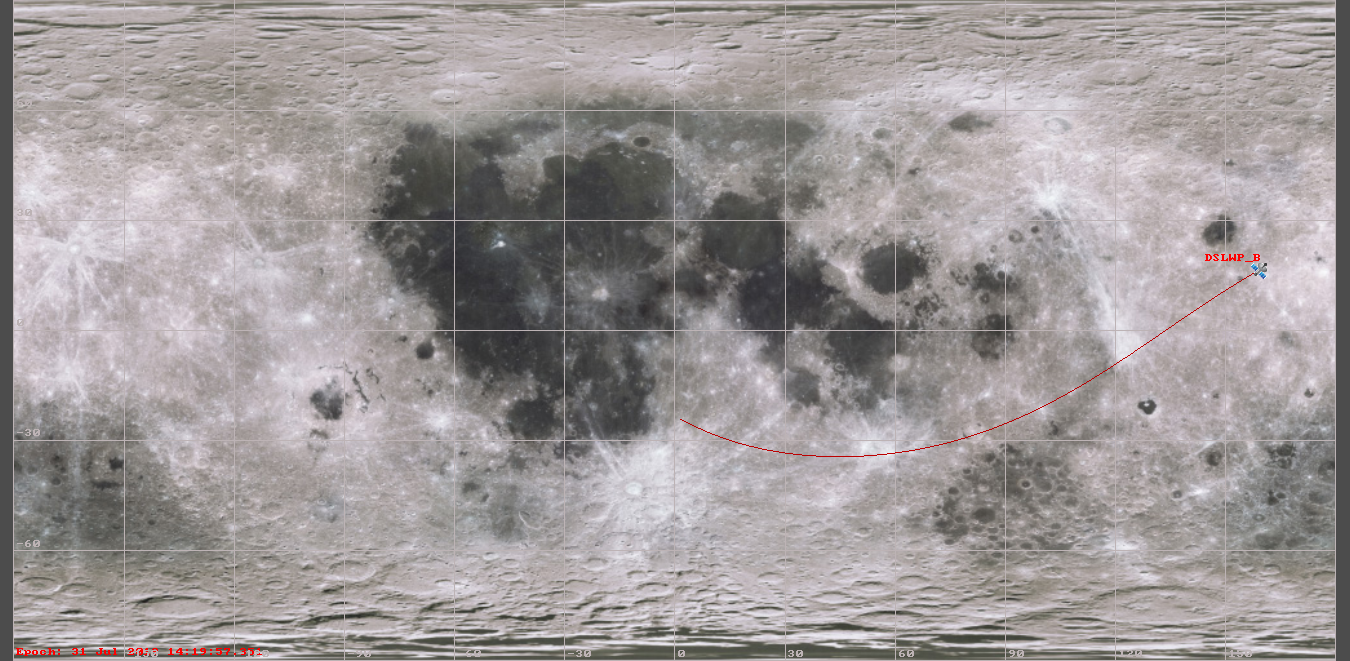
Using this GMAT script, I have obtained that the impact will happen on 2019-07-31 14:19:57 UTC, near Mare Moscoviense, in the lunar far side. This result is quite close to the calculations I did in May, which predicted an impact at 14:47 UTC.
The images below show the impact simulation in GMAT. Since the impact happens on the far side of the Moon, it will not be visible from Earth. There is an activation of the Amateur payload onboard DSLWP-B for 2019-07-31 13:24 to 15:24 UTC. The satellite will hide behind the Moon around 14:08 UTC. If the Moon was not solid, DSLWP-B would reappear around 14:35 UTC. The absence of radio signals after this moment will confirm that the impact has occurred.
DLSWP-B impact orbit in GMAT (view of Earth and Moon)DSLWP-B impact orbit in GMAT (top view)Ground track and location of DSLWP-B impact in GMAT
SkyFox Labs is having some trouble identifying the TLE corresponding to their Lucky-7 cubesat. The satellite was launched on July 5 in launch 2019-038 and a good match among the TLEs assigned to that launch has not being found yet. Over on Twitter, Cees Bassa has analyzed some SatNOGS observations and he says that NORAD ID 44406 seems the best match. However, this TLE has already been identified by Spire as belonging to one of their LEMUR satellites.
Fortunately, Lucky-7 has an on-board GPS receiver, and the team has been collecting position data recently. This data can be used to match a TLE to the orbit of the satellite, and indeed is much more accurate than the Doppler curve, which is the usual method for TLE identification.
Jaroslav Laifr, from the Lucky-7 team, has sent me the data they have collected, so that I can study it to find a matching TLE. The study is pretty simple to do with Skyfield. I have obtained the most recent TLEs for launch 2019-038 from Space-Track and computed the RMS error between each of the TLEs and the GPS measurements. The results can be seen in this Jupyter notebook.
The best match is NORAD ID 44406, with an RMS error of 8.7km. The second best match is NORAD ID 44404 (which is what SatNOGS has been using to track Lucky-7), with an RMS error of 51.3km. Most other objects have an error larger than 100km.
Therefore, my conclusion is clear. It is very likely that Spire misidentified NORAD ID 44406 as belonging to LEMUR 2 DUSTINTHEWIND early after the launch, when the different objects hadn’t drifted apart much. NORAD ID 44406 is a good match for Lucky-7. It will be interesting to see what Spire says in view of this data.
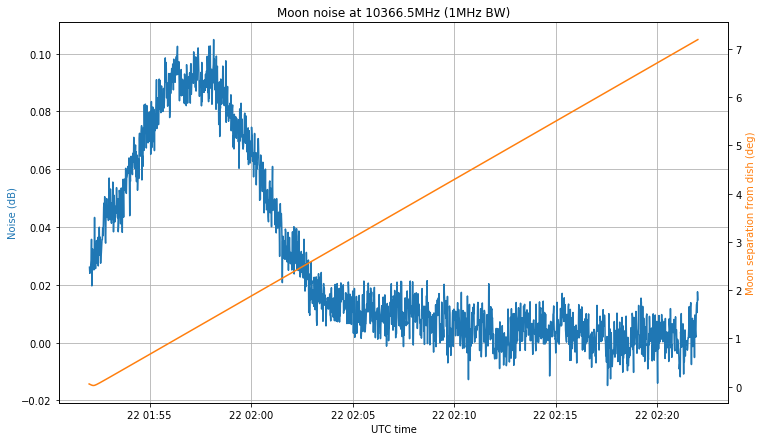
In May 25, the Moon passed through the beam of my QO-100 groundstation and I took the opportunity to measure the Moon noise and receive the Moonbounce 10GHz beacon DL0SHF. A few days ago, in July 22, the Moon passed again through the beam of the dish. This is interesting because, in contrast to the opportunity in May, where the Moon only got within 0.5º of the dish pointing, in July 22 the Moon passed almost through the nominal dish pointing. Also, incidentally this occasion has almost coincided with the 50th anniversary of the arrival to the Moon of Apollo 11, and all the activities organized worldwide to celebrate this event.
The figure below shows the noise measurement at 10366.5GHz with 1MHz and a 1.2m offset dish, compared with the angular separation between the Moon and the nominal pointing of the dish (defined as the direction from my station to Es’hail 2). The same recording settings as in the first observation were used here.
The first thing to note is that I made a mistake when programming the recording. I intended to make a 30 minute recording centred at the moment of closest approach, but instead I programmed the recording to start at the moment of closest approach. The LimeSDR used to make the recording was started to stream one hour before the recording, in order to achieve a stable temperature (this was one lesson I learned from my first observation).
The second comment is that the maximum noise doesn’t coincide with the moment when the Moon is closest to the nominal pointing. Luckily, this makes all the noise hump fit into the recording interval, but it means that my dish pointing is off. Indeed, the maximum happens when the Moon is 1.5º away from the nominal pointing, so my dish pointing error is at least 1.5º. I will try adjust the dish soon by peaking on the QO-100 beacon signal.
The noise hump is approximately 0.085dB, which is much better than the 0.05dB hump that I obtained in the first observation. It may not seem like much, but assuming the same noise in both observations, this is a difference of 2.32dB in the signal. This difference can be explained by the dish pointing error.
The recording I have made also covers the 10GHz Amateur EME band, but I have not been able to detect the signal of the DL0SHF beacon. Perhaps it was not transmitting when the recording was made. I have also arrived to the conclusion that the recording for my first observation had severe sample loss, as it was made on a mechanical hard drive. This explains the odd timing I detected in the DL0SHF signal.
The next observation is planned for October 11, but before this there is the Sun outage season between September 6 and 11, in which the Sun passes through the beam of the dish, so that Sun noise measurements can be performed.
Lucky-7 is a Czech Amateur 1U cubesat that was launched on July 5 together with the meteorological Russian satellite Meteor M2-2 and several other small satellites in a Soyuz-2-1b Fregat-M rocket from Vostochny. The payload it carriers is rather interesting: a low power GPS receiver, a gamma ray spectrometer and dosimeter, and a photo camera.
It transmits telemetry in the 70cm Amateur satellite band using 4k8 FSK with an Si4463 transceiver chip. Additional details about the signal can be found here.
After some work trying to figure out the scrambler used by the Si4463, I have added a decoder for Lucky-7 to gr-satellites. This post shows some of the technical aspects of the decoder.
During this week, the Amateur payload of DSLWP-B was active during the following slots:
14 Jul 19:00 to 21:00
15 Jul 12:00 to 14:00
17 Jul 04:40 to 06:50
18 Jul 20:50 to 22:50
20 Jul 14:20 to 16:20
21 Jul 05:30 to 07:30
Among these, the Moon was visible from Europe only on July 14, 18 and 21, so Dwingeloo only observed these days, which were mainly devoted to the download of SSDV images of the lunar surface. As usual, the payload took an image automatically at the start of each slot, so some of the slots were used for autonomous lunar imaging, even though no tracking was made from Dwingeloo.
This post is a detailed account of the activities done with DSLWP-B during the third week of July.
In my previous post I wrote about the outage of the Galileo EU satellite navigation constellation that started on 2019-07-12 01:50 GST. For several days, all the Galileo satellites kept transmitting the same batch of ephemeris, which corresponded to 2019-07-11 21:50 GST, rather than sending updated batches of ephemeris.
This situation continued until around 2019-07-16 19:00, when several people reported that they were receiving updated ephemeris from some Galileo satellites. These ephemeris could be used for navigation correctly. The NAVSAS group from University of Torino has published a post where they show, for each satellite, when the updated ephemeris were first received by their equipment in Torino, Italy.
The restoration of the system was publicly announced with NAGU 2019027, published on 2019-07-18 08:20. This NAGU stated that starting from 2019-07-17 20:52 the service was restored, but users might experience some instability.
It is interesting to look at the MGEX broadcast ephemeris to see what happened between 2019-07-16 19:00, when users started to see updated ephemeris, and 2019-07-18, when the system was considered to be fully restored. In this post, I do a detailed analysis of the broadcast ephemeris.
You may have already heard that the Galileo EU satellite navigation constellation is out of service since last Thursday July 11th. Currently the Galileo constellation status page shows that the status of most Galileo satellites is not usable because of a service outage. The satellites not affected by this outage are E20, which was made unavailable on 2014-05-27, and E14 and E18, the Galileo eccentric satellites, which failed to achieve the circular nominal orbit and are only used for testing purposes.
The European GNSS Agency has given very little information regarding the causes of the problem. The available information boils down to NAGU 2019026, posted on 2019-07-13 20:15, which states that starting from 2019-07-12 01:50 the Galileo signals should not be used.
This has originated many rumours and confusion about the problem. It seems that the major cause was a failure in the Precise Timing Facility, which is in charge of the generation of a realization of the GST, the timescale used by Galileo. This has affected the OSPF, which is the service that generates the orbit and clock products (ephemeris) for the satellites. Thus, since Thursday, no new ephemeris are being computed and uploaded to the satellites.
Taking rumours aside, in this post I will look at some facts about the outage which can be learned by analizing the Galileo signal. Other people have published similar studies, such as the NAVSAS group from University of Torino.