I have spoken in other occasions about planning the appropriate times to take pictures with the DSLWP-B Inory eye camera. In the beginning of October there was a window that allowed us to take images of the Moon and Earth. A lunar month after this we have new Moon again, so it is an appropriate time to take images with the camera.
This time, the Moon will pass nearer to the centre of the image than on October, and at certain times the Earth will hide behind the Moon, as seen from the camera. This opens up the possibility for taking Earthrise pictures such as the famous image taken during the Apollo 8 mission.
I have updated my camera planning Jupyter notebook to compute the appropriate moments to take images. The image below shows my usual camera field of view diagram.
The vertical axis represents the angular distance in degrees between each object and the centre of the image (Assuming the camera is pointing perfectly away from the Sun. In real life we can have a couple degrees of offset). The red lines represent the limits of the camera field of view, which are measured between the centre and the nearest edge, and between the centre and one corner. Everything between these two lines will only appear if the camera rotation is adequate. Everything below the lower line is guaranteed to appear, regardless of rotation.
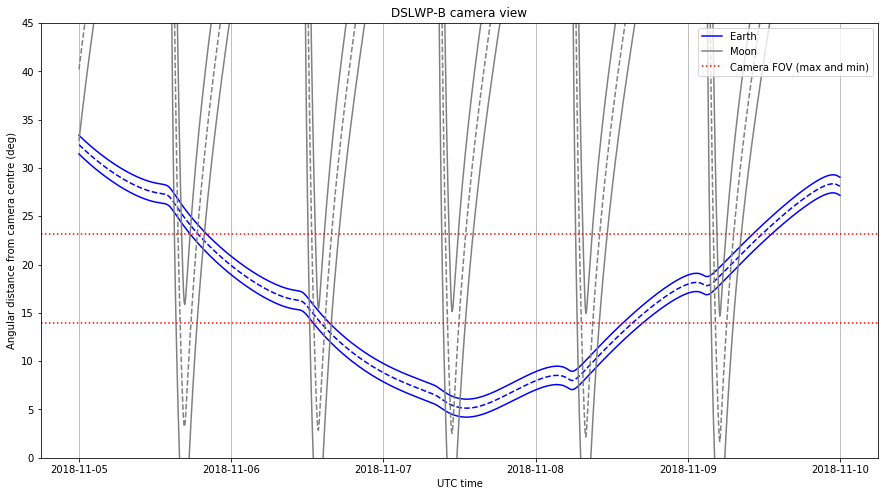
We see that between November 6th and November 9th there are four times when the camera will be able to image the Earth and the Moon simultaneously. On the 6th it is almost guaranteed that the Earth will appear inside the image, and on the 9th it depends on the orientation of the camera. On the 7th and 8th it is guaranteed that the Earth will be in the image.
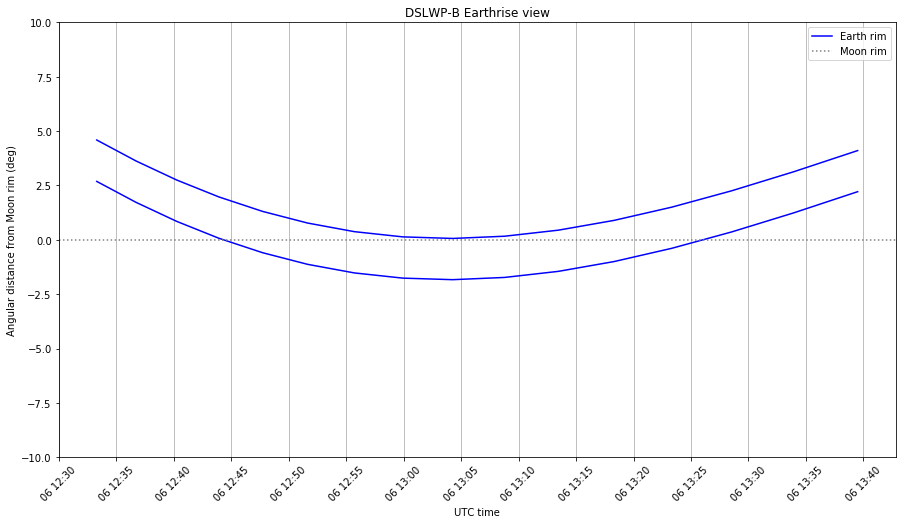
To compute appropriate times for taking an Earthrise picture, I have made the graph below. This shows the angular distance between the Earth and the rim of the Moon. If the distance is negative, the Earth is hidden by the Moon. We see that the Earth hides behind the lunar disc on each of the four days mentioned above.

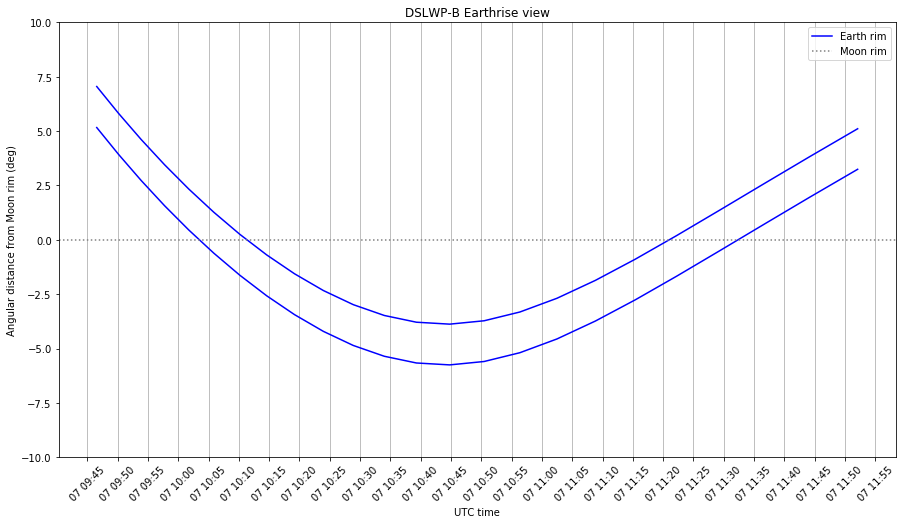
In the figures below, we zoom in each of the events. In this level of zoom we can plot the “inner” and “outer” Earth rim, so we can see when the Earth is partially hidden by the Moon.
On November 6th the situation is the most interesting in my opinion. It turns out the the Earth will not even hide completely between the Moon. In theory, a tiny sliver will remain visible. Also, it will take more time for the Earth to hide behind the Moon and then reappear. As we will see, the next days this will happen faster. Here, it takes 15 minutes for the Earth to hide, and another 15 minutes to reappear. It spends 10 minutes almost hidden.
It can be a good idea to take a series of 10 images with an interval of 5 minutes between each image, and spanning from 12:40 UTC to 13:30 UTC, to get a good coverage for this event.
On November 7th the Earth goes deeper into the lunar disc, taking 5 minutes to hide, spending 70 minutes hidden, and taking 10 minutes to reappear.
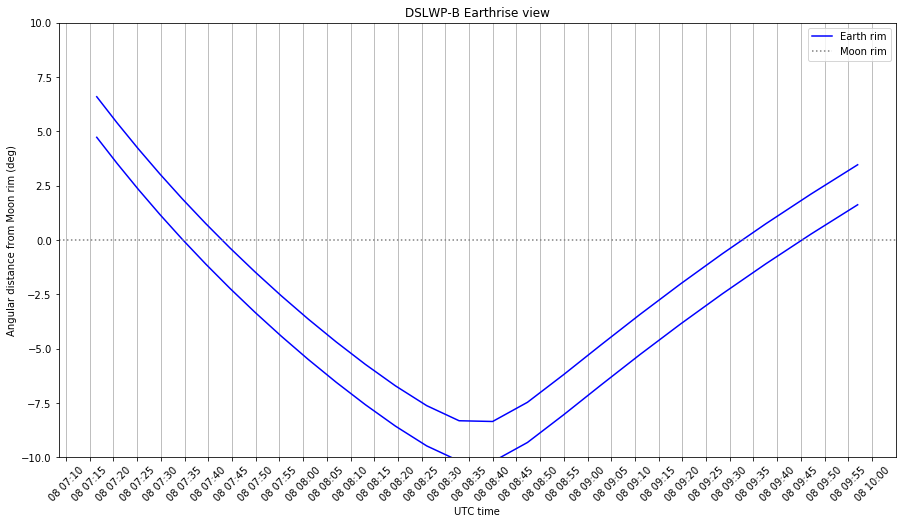
On November 8th the Earth goes even deeper into the lunar disc. It takes around 7 minutes to hide, spends 105 minutes hidden and takes 10 minutes to reappear.
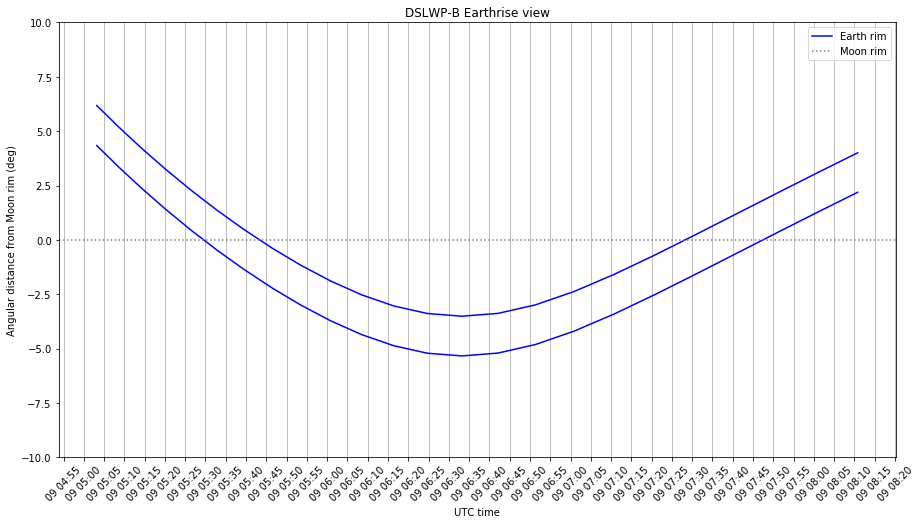
On November 9th the configuration is quite similar to November 7th, but the hiding speed is slower. It takes 15 minutes to hide, spends 100 minutes hidden and takes 15 minutes to reappear.
Overall, I think that the best would be to take a good series of images on November 6th, since this shallow occultation is a rarer event. The challenge will be perhaps to download all the images taken during these days. On average, I think we are downloading around 2 new images per 2 hour activation, taking into account repeats due to lost blocks and dead times. DSLWP-B is able to store 16 images onboard, and every time the UHF transmitter comes on, a new image is taken, overwriting an old image (more information in this post). Thus, if we take many images during these days, we have the danger of overwriting some when trying to download them over the next few days.
Perhaps a good strategy is to arrange for a series of 10 images to be taken on the 6th, and then programming the UHF transmitter to take an image as the Earth comes out of its occultation on the 7th, 8th and 9th. In this way, the 2 hour periods of these three days can be used to download some of the images taken on the 6th, and there are still 3 images of margin in the buffer in case something goes wrong during the downloads over the next few days.