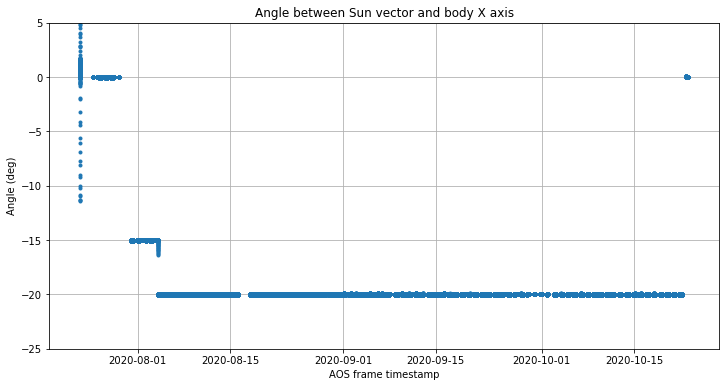
A month ago, I wrote a post showing the evolution of Tianwen-1‘s attitude so far during its transfer orbit to Mars. For most of the mission, the spacecraft has maintained a fixed attitude where the spacecraft body Y axis was held orthogonal to the planed formed by the spacecraft, Earth and Sun, and the spacecraft to Sun vector had a constant angle of -20 degrees with the spacecraft body X axis.
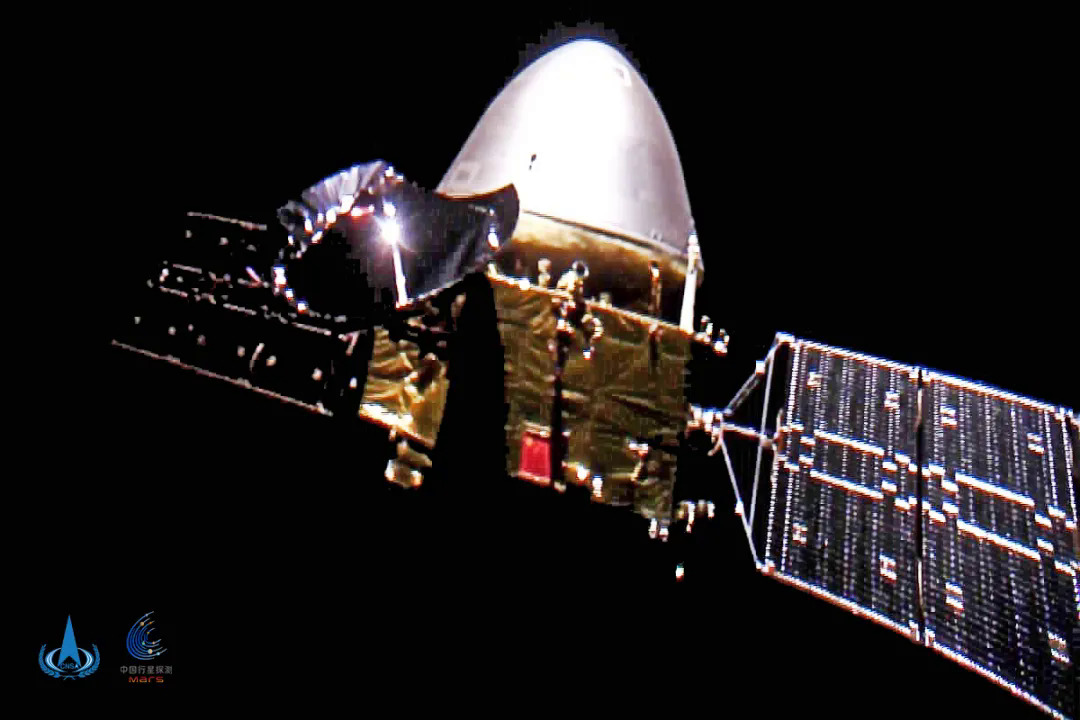
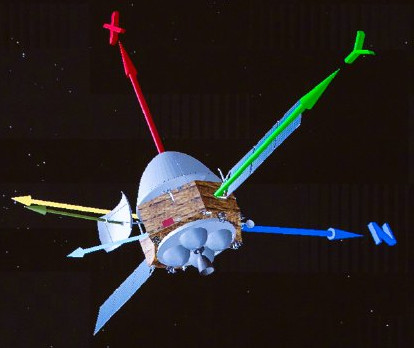
The figure below shows how the spacecraft axes are labelled. Note the solar panels along the Y axis, the thruster on the -X face, and the high gain antenna on the -Z face.
Yesterday, on 2020-10-22, the spacecraft made an attitude change. The angle between the Sun vector and the X axis was changed back to 0 degrees, which was the angle maintained during the first days of the mission. This can be seen clearly in the figure below.
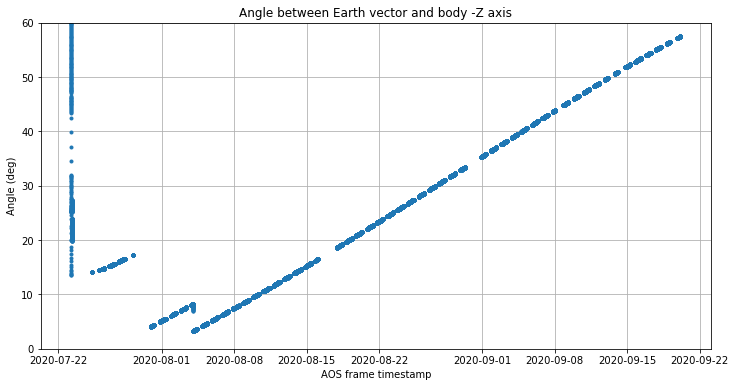
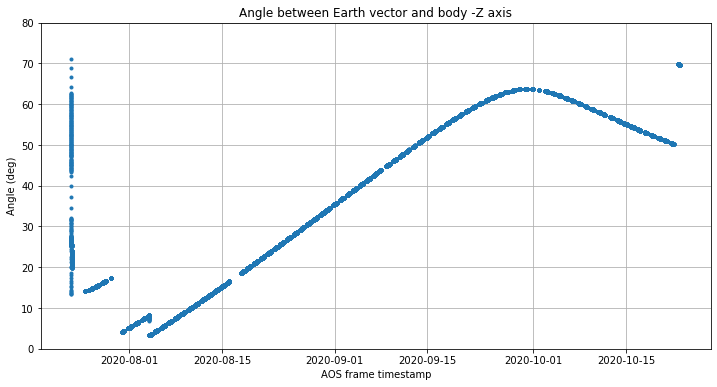
The angle between the Earth vector and the -Z axis (where the high gain antenna is located) is more interesting, as it gives the slew angle of the antenna. Throughout most of the mission, it was growing and I kept wondering if an attitude change would be done to prevent the antenna from running out of slew range. However, at some point the angle started decreasing. This is basically caused by the Earth “overtaking” Tianwen-1, since the Earth’s orbit is faster (you can see some pictures of this in the last slides of my talk in the AMSAT-UK colloquium).
In this graph we see that the change in attitude also causes a sudden increase of 20 degrees in this angle, so now it is 70 degrees. This shows that the possible slew range for the high gain antenna is much larger than I had initially thought. Perhaps it is not so surprising after we have seen the cut-out in the dish in the in-orbit images published on October 1.
If we zoom in to the last few days, we see that the change in attitude happened at some time when the spacecraft was not in view from Europe, so unfortunately we don’t have any telemetry of the change itself.

I’m not sure of the reason why this attitude change has been done now. It will be interesting to see if the attitude continues with this new 0 degree angle or it switches back to the previous -20 degree angle.
Thanks to AMSAT-DL‘s team at Bochum for continuing the daily collection of telemetry with the 20m antenna. Their effort makes it possible to detect events like this with short notice. The data and code to produce the plots in this post can be found in this Jupyter notebook.