Today, 2021-02-05 at 12:00 UTC, Tianwen-1 has executed TCM-4. This is its last trajectory correction manoeuvre before the arrival to Mars orbit next Tuesday February 10. This was reported by Chinese media together with a black and white image of Mars taken recently by the spacecraft.
As usual, I have analysed this manoeuvre by propagating forwards the last state vector that we have from the spacecraft’s telemetry before the manoeuvre, propagating backwards the first state vector that we have after the manoeuvre, and finding the intersection point of the two trajectories.
Bill Gray, from Project Pluto is doing a great job trying to estimate the orbit of Chang’e 5 as it travels to somewhere around the Sun-Earth L1 Lagrange point (see my previous post). He is using RF pointing data from Amateur observers and the Allen Telescope Array, since the low elongation and the distance of the spacecraft have made it impossible to observe it optically.
For this task, the pointing data I am obtaining with my observations on Allen Telescope Array as part of the activities of the GNU Radio community there is quite valuable, since the 6.1 metre dishes give more accurate pointing measurements than the smaller dishes of Amateurs. The pointing data from ATA should be accurate to within 0.1 or 0.2 degrees.
To try to get more accurate data for Bill, last weekend I decided to do a recording with two dishes from the array, with the goal of using interferometry to obtain a much more precise pointing solution that what can be achieved with a single dish. This post is a report of the processing of the interferometric data.
If you follow me on Twitter you’ll probably have seem that lately I’m quite busy with the Chang’e 5 mission, doing observations with Allen Telescope Array as part of the GNU Radio activities there and also following what other people such as Scott Tilley VE7TIL, Paul Marsh M0EYT, r00t.cz, Edgar Kaiser DF2MZ, USA Satcom, and even AMSAT-DL at Bochum are doing with their own observations. I have now a considerable backlog of posts to write, recordings to share and data to process. Hopefully I’ll be able to keep a steady stream of information coming out.
In this post I study the observation I did with Allen Telescope Array last Sunday 2019-11-29. During the observation, I was tweeting live the most interesting events. The observation is approximately 3 hours long and contains the LOI-2 (lunar orbit injection) manoeuvre near its end. LOI-2 was a burn that circularized the elliptical lunar orbit into an orbit with a height of approximately 207km over the lunar surface.
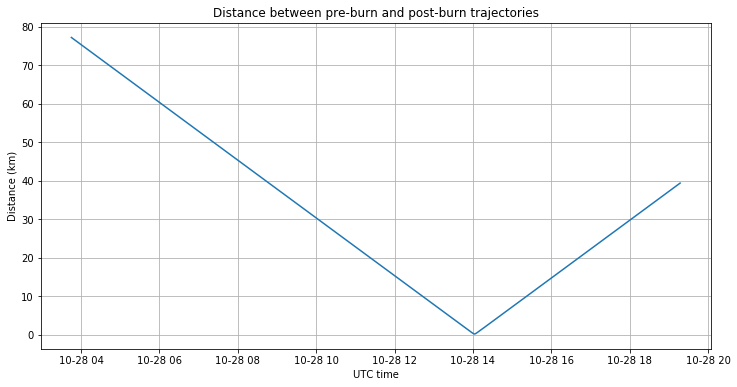
On 2020-10-28 at 14:00 UTC, Tianwen-1 has made its third trajectory correction manoeuvre. This has been the next manoeuvre after the deep space manoeuvre at the beginning of October. According to the press release, this was a firing of the eight 25N thrusters intended as a minor correction and as a test of this propulsion system. I haven’t found the duration of the burn in the news.
I have followed the same method as in previous burns to compute the moment of the burn and the delta-V vector by extrapolating the telemetry orbit state vectors received by AMSAT-DL in Bochum before and after the burn. This extrapolation locates the burn at 14:02:28 UTC. Note that this time is an approximation for the mid-point of the burn.
The delta-V vector was, in m/s
[-0.6575566 , -0.11513034, 1.97535319],
and the magnitude was 2.09m/s. Assuming a mass of 5000kg and eight 25N thrusters, it would take a burn of 52 seconds to achieve this delta-V.
Update 2020-10-30: according to this news article, the duration of the burn was 42.8 seconds which is some 18% smaller than my estimate. Note that my estimate didn’t take into account the mass of fuel spent by the deep space manoeuvre, which I estimated to be 457kg (giving a decrease in mass of 9%).
Apparently this burn has lowered the periares height significantly in comparison to the trajectory following the deep space manoeuvre, which was around 18000km. Thanks to Achim Vollhardt for noticing this. It’s difficult for me to give a good estimate of the new periares height, because it is quite sensitive to orbit perturbations. I’ve obtained anything between 30 and 800 km by enabling and disabling solar radiation pressure in the GMAT propagator, and we don’t have a good estimate of the spacecraft’s cross-section and reflection coefficient.
The figure below shows one of the GMAT simulations. Note that the periares is near the equator, which is good for insertion into a low inclination orbit.
Periares passage in GMAT
Keep in mind that according to the media still one more trajectory correction manoeuvre remains and that the data used in this post comes straight from the spacecraft’s telemetry, and as such is most likely based on a prediction of the burn rather than on the actual performance of the burn. In a few days, I will publish a new post when the Chinese DSN perform precise orbit determination and upload updated orbital information to the spacecraft.
A month ago, I wrote a post showing the evolution of Tianwen-1‘s attitude so far during its transfer orbit to Mars. For most of the mission, the spacecraft has maintained a fixed attitude where the spacecraft body Y axis was held orthogonal to the planed formed by the spacecraft, Earth and Sun, and the spacecraft to Sun vector had a constant angle of -20 degrees with the spacecraft body X axis.
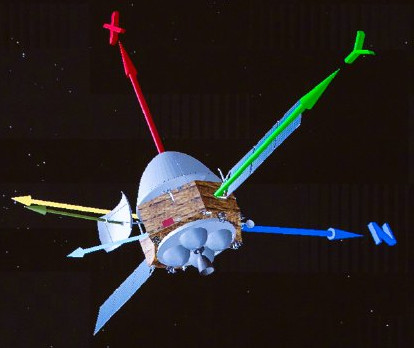
The figure below shows how the spacecraft axes are labelled. Note the solar panels along the Y axis, the thruster on the -X face, and the high gain antenna on the -Z face.
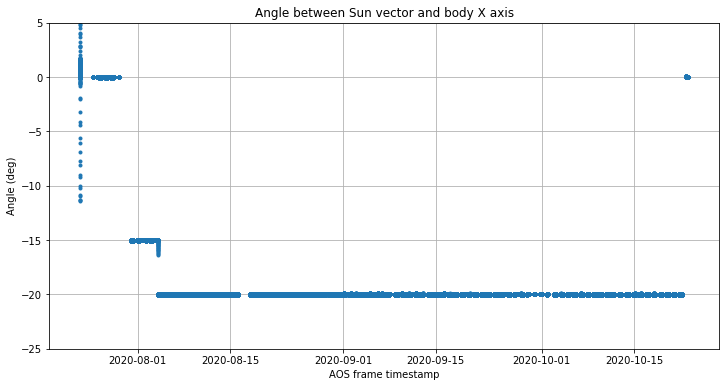
Yesterday, on 2020-10-22, the spacecraft made an attitude change. The angle between the Sun vector and the X axis was changed back to 0 degrees, which was the angle maintained during the first days of the mission. This can be seen clearly in the figure below.
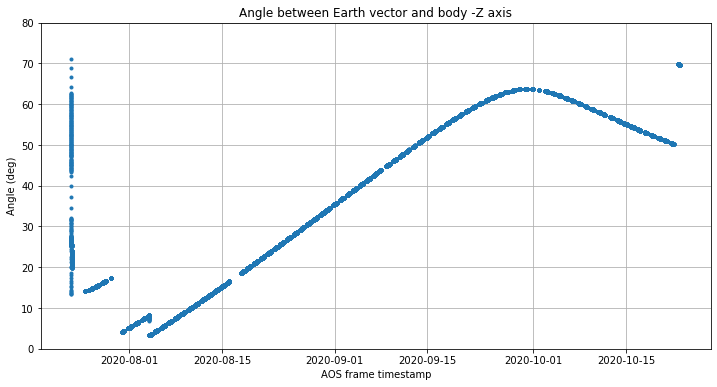
The angle between the Earth vector and the -Z axis (where the high gain antenna is located) is more interesting, as it gives the slew angle of the antenna. Throughout most of the mission, it was growing and I kept wondering if an attitude change would be done to prevent the antenna from running out of slew range. However, at some point the angle started decreasing. This is basically caused by the Earth “overtaking” Tianwen-1, since the Earth’s orbit is faster (you can see some pictures of this in the last slides of my talk in the AMSAT-UK colloquium).
In this graph we see that the change in attitude also causes a sudden increase of 20 degrees in this angle, so now it is 70 degrees. This shows that the possible slew range for the high gain antenna is much larger than I had initially thought. Perhaps it is not so surprising after we have seen the cut-out in the dish in the in-orbit images published on October 1.
If we zoom in to the last few days, we see that the change in attitude happened at some time when the spacecraft was not in view from Europe, so unfortunately we don’t have any telemetry of the change itself.
I’m not sure of the reason why this attitude change has been done now. It will be interesting to see if the attitude continues with this new 0 degree angle or it switches back to the previous -20 degree angle.
Thanks to AMSAT-DL‘s team at Bochum for continuing the daily collection of telemetry with the 20m antenna. Their effort makes it possible to detect events like this with short notice. The data and code to produce the plots in this post can be found in this Jupyter notebook.
A few days ago I spoke about the deep space manoeuvre that Tianwen-1 had executed on 2020-10-09. As remarked in that post, the data we had from that manoeuvre came from extrapolating state vectors from before and after the burn. The state vectors that the spacecraft was broadcasting after the burn most likely came from a prediction rather than from the actual result of the burn. In a few days, we would see a small change in the trajectory as the Chinese DSN performed precise orbit determination and uploaded the results to the spacecraft.
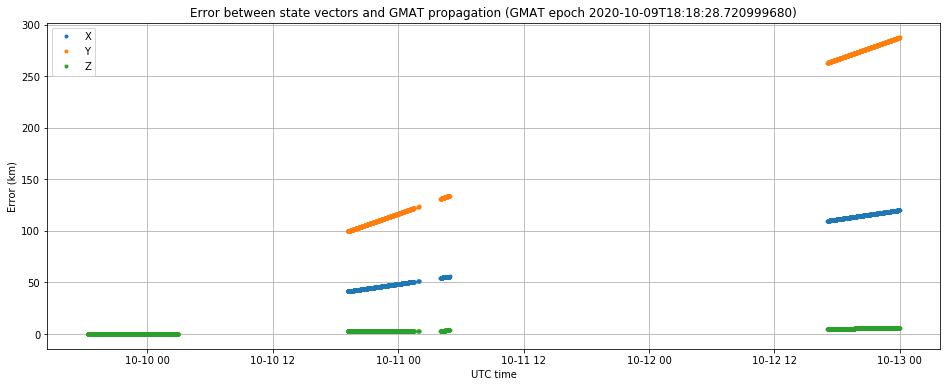
In fact, we saw that change the next day. The figure below is generated in the following way. I have taken the first state vector that we have received after the burn, and propagated its trajectory in GMAT. Then I compute and plot the error in each of the ICRF coordinates between the state vectors broadcast by the spacecraft in the telemetry and this GMAT trajectory. This allows us to see whether the trajectory broadcast by the spacecraft has changed slightly at some point.
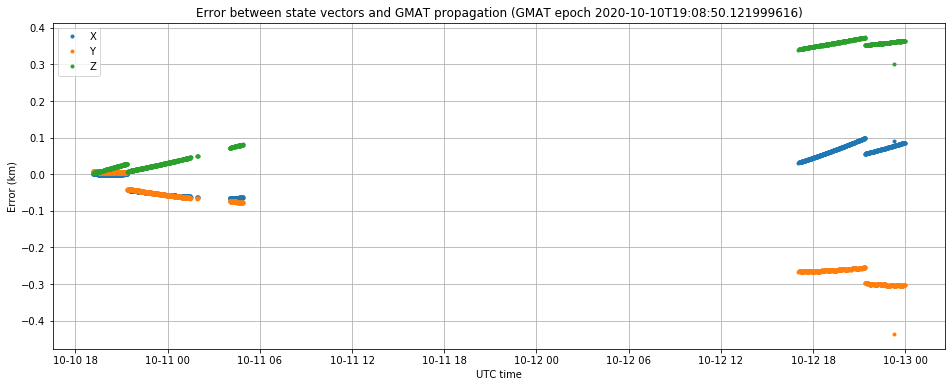
As we can see, during the first day the error is close to zero. Afterwards, the trajectory deviates and the error starts growing to several hundreds of km. The new trajectory seems to be stable over the last few days (sorry about the lack of data on the night between the 11th and 12th). This is best shown in the figure below, where the state vector used as a seed to generate the GMAT trajectory is taken from the UTC evening of 2020-10-10. The error is only a fraction of a km. Therefore, we can consider final this new trajectory.
I have updated the calculations I did in the last post to use a state vector from the updated final trajectory. The results don’t change much. The calculations now locate the burn (approximated as an impulse burn) at 15:03:54 UTC with a delta-V of
[-31.08193895, 40.28872314, 308.12845989]
in ICRF coordinates, while my previous calculations estimated a burn at 15:03:59 with a delta-V of
[-31.49477234, 39.29765307, 308.11690616]
The state vector describing the updated post-DSM trajectory in heliocentric ICRF coordinates and UTC epoch is
As I have mentioned in several posts, the trajectory in which Tianwen-1 was launched had a closest approach to Mars of around 3 million km, so at some point a large correction manoeuvre was needed. We had already seen small manoeuvres TCM-1 and TCM-2, but we were expecting soon enough this large correction, which is called DSM (deep space manoeuvre). Some sources placed the DSM around the beginning of October, while others were more precise and mentioned that it would happen right after the Mid-Autumn festival holiday season, which this year ended on October 8.
This information turned out to be pretty accurate, since yesterday we heard news that Tianwen-1 had done its DSM at 15:00 UTC on 2020-10-09. This information quickly appeared in the news.
After the Bochum 20m antenna was able to acquire the spacecraft’s signal and gather telemetry at 19:09 UTC, we were able to confirm the manoeuvre in the state vectors transmitted by the spacecraft. Paul Marsh M0EYT was also able to receive telemetry confirming this, starting at 18:18 UTC. This post is an analysis of the data.
Last Sunday September 20, around 14:15 UTC, I published a post with an update on Tianwen-1‘s attitude during the mission. I mentioned that we were expecting to see an attitude change to prevent the high-gain antenna from exceeding its maximum slew range. I also mentioned that we were expecting the second trajectory correction manoeuvre (TCM-2) to happen sometime in September according to Chinese media.
Apparently the timing of my post was quite appropriate, because shortly afterwards, at 15:00 UTC (23:00 Beijing time), Tianwen-1 executed its TCM-2. However, news of this didn’t appear until the next morning, at 7:00 Beijing time (23:00 UTC). Unfortunately the manoeuvre happened when the spacecraft wasn’t in view from Europe, so we don’t have Doppler data as for TCM-1. In any case, we can use the state vectors transmitted in the telemetry to study the manoeuvre, by comparing the vectors received before the burn and those received after the burn. In this post I look at this and check if it matches the news report.
A month ago I posted about the ADCS telemetry of Tianwen-1 and how it was controlling its attitude on its cruise orbit to Mars. Since then, AMSAT-DL has been collecting telemetry data from Tianwen-1 using the 20m antenna at Bochum observartory almost all the time that the spacecraft is in view from Germany. This short post is an update with the results collected so far.
Tianwen-1’s attitude is controlled by maintaining the spacecraft’s Y axis (on which the solar panels lie) perpendicular to the plane formed by the Sun, Earth and spacecraft, and by maintaining a fixed angle between the spacecraft’s X axis and the Sun vector. This is done to prevent the solar panels from having to steer constantly to track the Sun.
The figure below shows the angle between the Sun vector an the X axis using all the telemetry collected as of writing this post. We see that the Sun angle was fixed to 0 degrees at the start of the mission, then was changed to -15 degrees for a few days, and finally has been kept at -20 degrees since the beginning of August.
All the dots shown in this picture correspond to telemetry recorded either at Bochum or by Paul Marsh M0EYT. Many thanks to all people involved for their continuous effort in recording telemetry data.
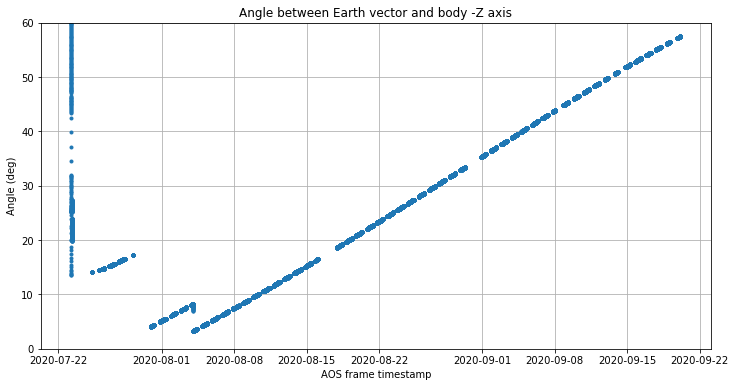
Since the Sun-Earth angle, as seen from the spacecraft, changes as the spacecraft travels along the transfer orbit, and the spacecraft maintains a fixed Sun angle, the Earth angle keeps changing. The high-gain antenna is placed on the -Z axis according to diagrams of the spacecraft. However, the antenna can slew to track the Earth. The figure below shows the angle between the Earth vector and the -Z axis, which is precisely the slew angle needed to point the high-gain antenna.
We see that this slew angle keeps increasing with time. The slew angle of the antenna is limited mechanically, though we don’t know the maximum slew angle. At some point, the spacecraft will have to yaw and reduce its Sun-to-X angle in order to reduce the slew angle to an acceptable value. This is one of the events we are hoping to capture soon in the telemetry.
I don’t know the reason why the spacecraft yawed two times near the beginning of the mission. At first, I thought that the antenna slew was limited to perhaps 20 degrees, so the spacecraft would need to yaw every couple of week to maintain an acceptable antenna slew. Now it is clear that this is not the case, since the slew angle is near 60 degree. It may happen that the spacecraft was yawed for thermal reasons.
The other event we are expecting is the second correction manoeuvre, which according to some sources will happen in September. So far we haven’t seen any indication of this in the telemetry, so stay tuned for more news.
The updated Jupyter notebook where these plots have been made is here.
In a previous post I talked about the ADCS telemetry of Tianwen-1. In there I showed that Space Packets in APID 1281 had several fields corresponding to the ADCS, including the quaternion giving the spacecraft attitude. I used these quaternions to show that the spacecraft had made a turn of 15º about its Y axis. However, at that time I still lacked some details to give a full interpretation of the attitude quaternions, such as what frame of reference they used or how were the spacecraft body axes defined.
Now I have looked at all the telemetry we have collected so far and with this I’ve been able to guess the missing details, so I can give a complete interpretation of the attitude quaternions. In this post I will show the attitude control law of Tianwen-1 on its cruise orbit to Mars and also the attitude during early orbit operations.