As you may already know, most of the pictures taken so far by the DSLWP-B Inory eye camera have been over-exposed purple things. In order to take more interesting pictures, such as pictures of the Earth and the Moon, we have to plan ahead and know when these objects will be in view of the camera.
The picture below shows a diagram of DSLWP-B. The solar panel is behind the main body, pointing towards the back right. The Inory eye camera points in the opposite direction, towards the front left of the diagram. The camera is located in the front panel of the Amateur radio module, which is one of the pink modules.
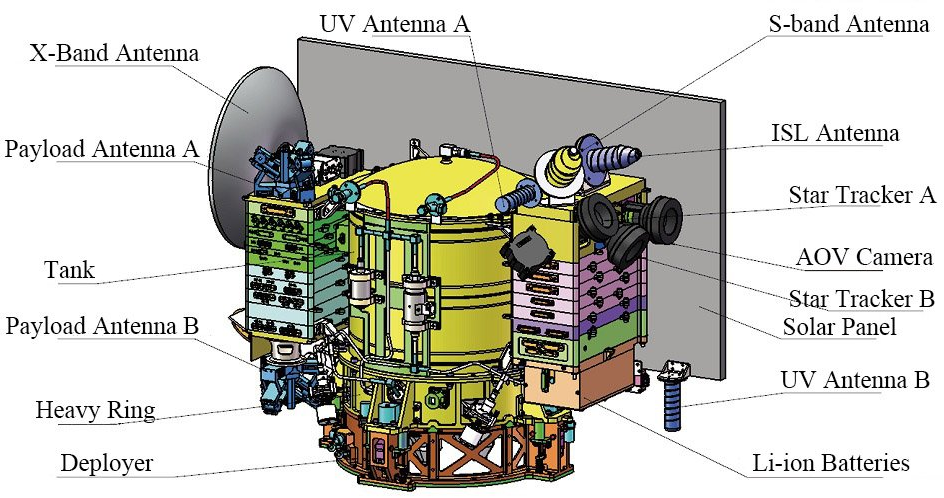
In the nominal flight configuration, the solar panel is pointed towards the Sun to gather the maximum amount of sunlight. Therefore, the camera should point opposite to the Sun. This is good, because objects in the field of view of the camera are guaranteed to be well illuminated and it also prevents the Sun from appearing in the image, causing lens flare.
In one of the images taken previously by the camera there is a very bright lens flare, possibly caused by the Sun hitting the camera directly. This seems to indicate that the spacecraft is not always in the nominal flight orientation. As the orientation is very important when doing photo planning, here we assume that the spacecraft is always oriented in the nominal flight configuration, with its camera pointing opposite to the Sun.
We use GMAT with the 20181006 tracking file from dswlp_dev for the orbital calculations. The GMAT script can be downloaded here.
To simulate the orientation of the camera in GMAT, I have used an ObjectReferenced coordinate system. The primary is the Sun, the secondary is DSLWP-B, and the axes are chosen as X = R, Z = N. Therefore, the X axis points away from the Sun, in the direction of the camera. The orbit view is centred on DSLWP-B and points towards +X, so it shows what the camera would see (except for the field of view, which is not simulated).
When propagating the orbit in GMAT we see that the Earth passes near the +X axis every Lunar month and that the Moon crosses the image every orbit.
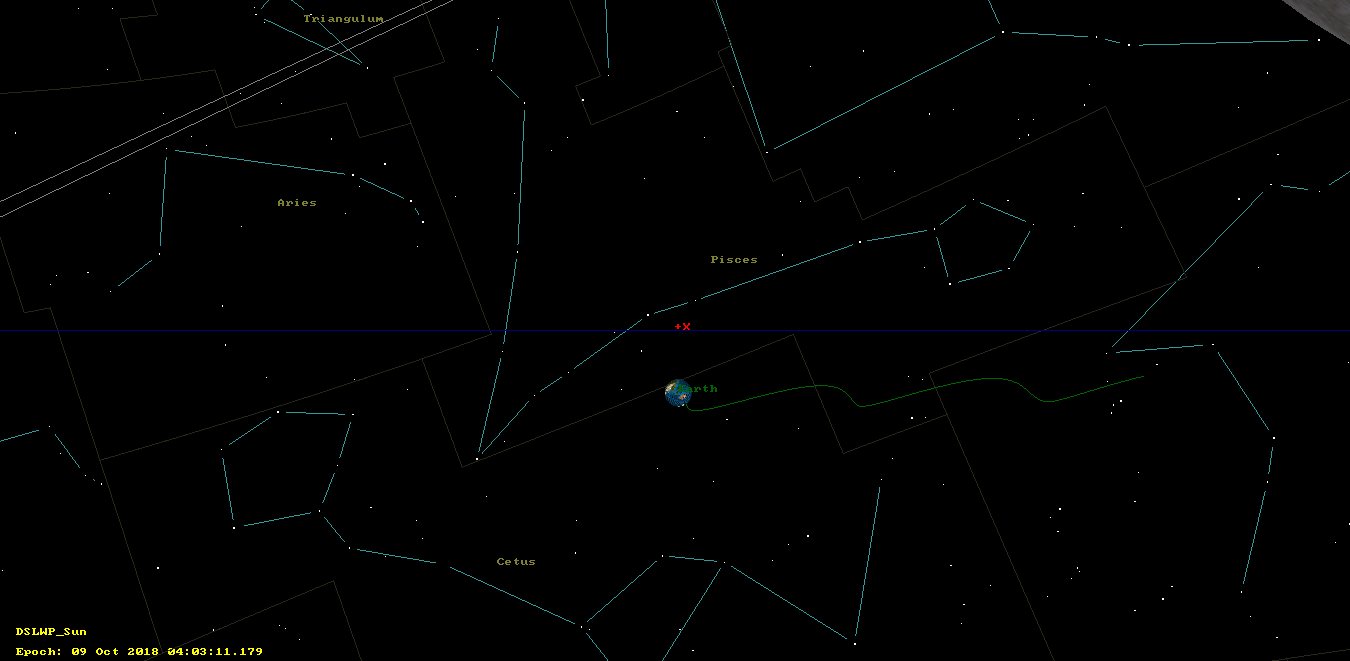
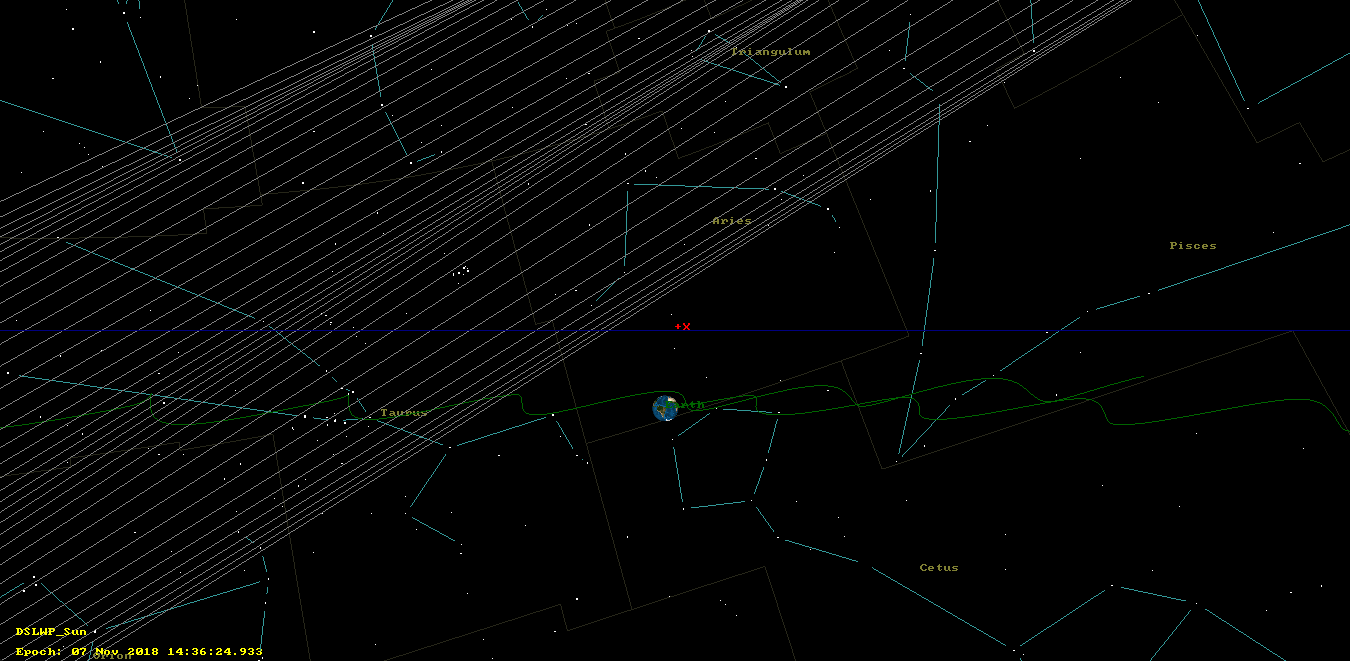
The two images below show the dates when the Earth will pass nearby the +X axis. These dates are good candidates for taking images of the Earth. From the point of view of the camera, the Earth seems to orbit slowly from right to left in these images. Therefore, there should be a tolerance of a couple of days as to when the images of the Earth could be taken.
Thus, we see that the next good dates for attempting to take images of the Earth are October 9 and November 7 (plus/minus a couple days of margin).
The Moon is much larger from the point of view of DSLWP-B and we have seen already that it fills the field of view of the camera completely. Thus, even though in this GMAT simulation the Moon crosses the screen every orbit, we need to wait until the path taken by the Moon is near the centre of the screen.
In the image below we see a good moment to take an image of the Moon. From the point of view of the camera, the Moon crosses from top to bottom of the screen every orbit and its path moves slightly to the right every time, taking it closer to the centre as we progress towards December.
Therefore, a good moment to attempt to take an image of the Moon is late October and all of November. However, the time when the picture is taken is critical, because the Moon crosses the screen quickly. It is near the +X axis only for one or two hours. Therefore, starting in late October, there will be a window of a couple hours each orbit (or each day, since the orbital period is close to one day) where photos of the Moon can be attempted.

Judging by one of Wei Mingchuan BG2BHC’s lasts tweets, he has also been thinking about dates to take good images with the camera. It would be interesting to know if his findings match what I have exposed here.
A good question when doing this sort of planning is what is the field of view of the camera. Probably this can be estimated from some of the existing images.