Today, the Chinese media published a short piece of news stating that tomorrow, 2021-02-15, Tiawen-1 will make make a plane change to a polar orbit. The post is accompanied by an short video, which includes an animation depicting the manoeuvre. A screenshot of the video is shown below. As the spacecraft arrives to apoapsis, it effects a plane change into an ascending polar orbit.
Tianwen-1 plane change manoeuvre. Source 人民日报 in weibo.com
This is a good moment to review the maths behind a plane change manoeuvre and compute what the manoeuvre will look like.
In the case of Tianwen-1 the signal was pretty strong even while the spacecraft was on the low gain antenna, and we could clearly see the change in Doppler rate as the thrusters fired up. However, in the case of Emirates Mars Mission the signal disappeared as soon as the spacecraft switched to the low gain antenna. In fact DSN Now reported a received power of -155 dBm with the 34m DSS55. That was a large drop from the -118 dBm that it was reporting with the high gain antenna. Therefore, nothing could be seen in the livestream waterfall until the spacecraft returned to the high gain antenna, well after the manoeuvre was finished.
Nevertheless, a weak trace of the carrier was still present in the livestream audio, and it could be seen by appropriate FFT processing, for example with inspectrum. I put up a couple of tweets showing this, but at the moment I wasn’t completely sure if what I was seeing was the spacecraft’s signal or some interference. After the livestream ended, I’ve been able to analyse the audio more carefully and realize that not only this weak signal was in fact the Hope probe, but that the start of the burn was recorded in perfect conditions.
In this post I’ll show how to process the livestream audio to clearly show the change in drift rate at the start of the burn and measure the acceleration of the spacecraft.
Recording of the low data rate telemetry at 8463.7 MHz for some 15 minutes at 6:00 UTC. This frequency was in ground-lock at that time, as shown by the telecommand loopback at +/-8kHz from the main carrier (there are several telecommand packets being transmitted, plus the usual idle telecommand subcarrier)
Five recordings of a high-speed signal at 8495 MHz. The recording was done at 21:10 UTC, has a length of 5 minutes, and is split in five files due to a constraint of 2GB in the size of the recorded files.
In this post I look at the telemetry decoded from these recordings.
If you follow me on Twitter you’ll probably have seem that lately I’m quite busy with the Chang’e 5 mission, doing observations with Allen Telescope Array as part of the GNU Radio activities there and also following what other people such as Scott Tilley VE7TIL, Paul Marsh M0EYT, r00t.cz, Edgar Kaiser DF2MZ, USA Satcom, and even AMSAT-DL at Bochum are doing with their own observations. I have now a considerable backlog of posts to write, recordings to share and data to process. Hopefully I’ll be able to keep a steady stream of information coming out.
In this post I study the observation I did with Allen Telescope Array last Sunday 2019-11-29. During the observation, I was tweeting live the most interesting events. The observation is approximately 3 hours long and contains the LOI-2 (lunar orbit injection) manoeuvre near its end. LOI-2 was a burn that circularized the elliptical lunar orbit into an orbit with a height of approximately 207km over the lunar surface.
Chang’e 5 is a Chinese lunar sample return mission. It was launched a few days ago on 2020-11-23 from Wenchang and is estimated to perform lunar orbit injection on Saturday. Since then, a number of Amateurs such as USA Satcom, Paul Marsh M0EYT, Scott Tilley VE7TIL, Fer IW1DTU and others have been receiving the X-band signals from the spacecraft and posting reports over on Twitter. Meanwhile, r00t.cz has been working in decoding the frames, which has led him to the amazing achievement of being able to retrieve a short video from the signal.
In this post I will look at some of the frames demodulated by USA Satcom and Paul during the first couple of days of the mission. The frame structure has many similarities with Tianwen-1, which I have described in several posts, such as here and here. However, there are some interesting differences.
Mars 2020, NASA’s latest mission to Mars, was launched a couple weeks ago. However, with all the Tianwen-1 work down the pipeline, until now I haven’t had time to dedicate an appropriate post to this mission (though I showed some sneak peek on Twitter). This mission consists of a rover and helicopter (a real novelty in space exploration). Both were launched with the cruise stage and the entry, descent and landing system on July 30 from Cape Canaveral, an are currently on their transfer orbit to Mars, as Tianwen-1 and Emirates Mars Mission.
In this post I will be working with some recordings made by AMSAT-DL using the 20m radio telescope at Bochum’s observatory. These feature the low rate safe mode telemetry, which was very strong and caused some anecdotes as it saturated some NASA DSN receivers, and the nominal 10kbps telemetry signal that was switched on later. Here I will describe the modulation and coding, giving GNU Radio decoders, and also take a look at the data. r00t.cz has also written a post where he shows similar information.
Yesterday I reported about Tianwen-1’s first trajectory correction manoeuvre, TCM-1. In that post I commented the possibility that the updated state vectors that we saw on the telemetry after TCM-1 might come from a prediction or planning rather than take into account the actual performance of the burn.
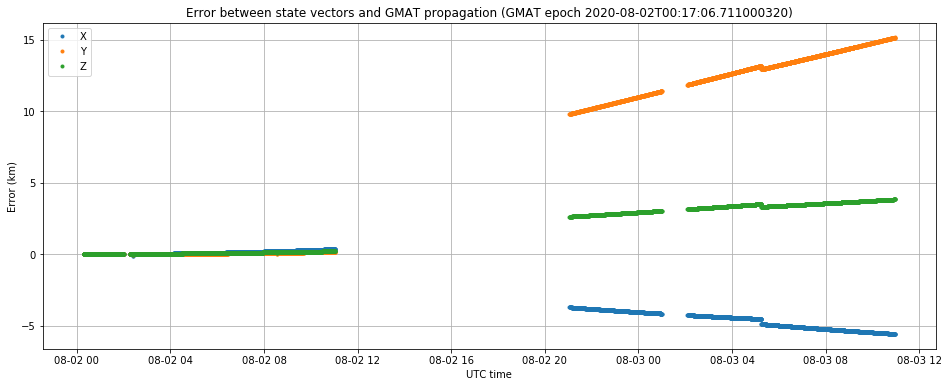
The figure below shows the error between the state vectors collected after TCM-1 over the last two days, and a trajectory propagated in GMAT, using the following state vector, which is one of the first received after TCM-1.
We see that on the UTC night between August 1 and 2 the state vectors deviate very little from the GMAT trajectory. However, on the UTC night between August 2 and 3 we see a slightly different trajectory in the state vectors. We have no data in between, as the spacecraft is not visible in Europe, so we don’t know the precise moment of change. The gap in telemetry around 2020-08-03 00:45 UTC is due to a transmission of high-speed data.
It seems reasonable to think that after TCM-1 the Chinese DSN performed precise ranging of the spacecraft to determine the new orbit accurately and then uploaded a correction to the state vectors on-board Tianwen-1.
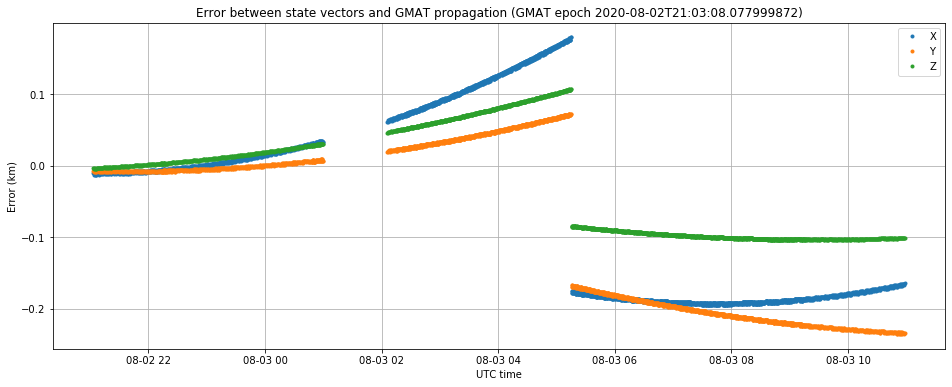
The state vectors from last night all describe the same trajectory, as shown in the plot below which uses
to propagate a trajectory in GMAT. There is a small jump of a few hundred meters at some point. We usually see one or two these jumps per day, but we don’t understand well why they happen.
The trajectory according to the state vectors from 00:17:06 and from 21:03:08 are very similar. For example, at the closest approach to Mars they only differ in 1197km. For comparison, the difference between the new trajectory and the pre–TCM-1 trajectory is 126529km (again, at the closest approach to Mars).
Since Tianwen-1 transmits its own real time orbit state vectors in the telemetry, by comparing the vectors transmitted before and after TCM-1, and also by studying the Doppler observed by groundstations on Earth, we can learn more about the manoeuvre.
On the Beijing time morning of 2020-07-30, Tianwen-1 did something. Paul Marsh M0EYTreports that the probe first switched from the high gain antenna to the low gain antenna, then returned to the high gain antenna, and then switched to a high-speed data mode, finally coming back to the usual 16384baud telemetry.
r00t.cz has already analysed the telemetry data collected during this event. He reports that the high speed data was a replay of the telemetry produced during the period when the low gain antenna was used. He shows some interesting behaviour on APIDs 1280, 1281 and 1282 (see my previous post for a description of these during nominal operation). These seem to contain ADCS data.
This event was followed with some expectation by the Amateur deep space tracking community, since according to this paper Tianwen-1 would make the first correction manoeuvre (TCM-1) early on in the mission (day 9 is stated in the paper). However, by now it is clear that a true correction manoeuvre didn’t happen, since no significant change has been seen in the trajectory described by the state vectors transmitted in the spacecraft’s telemetry. However, this event might have been a very small thruster firing, in order to test the propulsion in preparation for the true TCM-1.
In this post, I look at the data during the high speed replay, following the same approach as in the previous post. With this data, I reach a definite conclusion of what happened during this event (I won’t spoil the mystery by stating it in advance). The description of the modulation and coding used by the high speed data will come in a later post.
The Jupyter notebook for the calculations in this post can be found here.
This is a follow-up to my previous post, where I explained the modulation and coding of Tianwen-1’s telemetry. In this post I will explain the framing structures and the data contained in the telemetry (though we only understand a few of the telemetry channels). Most of what I’m going to explain here was found first by r00t.cz and is already presented in his Tianwen-1 page. In this post I’ll try to give a bit more detail (especially for those not so familiar with the CCSDS protocols) and some Python code for those interested in digging into the data.