At the end of July, Benjamin Menkuec was commenting in Twitter about some issues he had while demodulating a 5G NR downlink recording. There was a lively discussion in which other people and I participated. I had never touched 5G, but had done some work with LTE, so I decided to take the chance to learn more about the 5G physical layer. Compared to LTE, the changes are more evolutionary than revolutionary, but understanding what has changed, and how and why, is part of the puzzle.
I had to take an 11.5 hour flight in a few days, so I thought it would be a nice challenge to give this a shot, take with me the recordings that Benjamin was using and all the 3GPP documents, and write a demodulator in a Jupyter notebook from scratch during the flight, as I had done in the past with my LTE recordings. This turned out to be an enjoyable and interesting experience, quite different from working at home in shorter intervals scattered over multiple days or weeks, and with internet access. At the end of the flight I had a mostly working demodulation, but it had a few weird problems that turned out to be caused by some mistakes and misconceptions. I worked on cleaning this up and solving the problems over the next few days, and also now preparing this post.
Rather than trying to give an account of all my mistakes and dead ends (I spoke a little about these in Twitter), in this post I will show the final clean solution. There are some tricky new aspects in 5G NR (phase compensation, as we will see below) which can be quite confusing, so hopefully this post will do a good job at explaining them in a simple way.
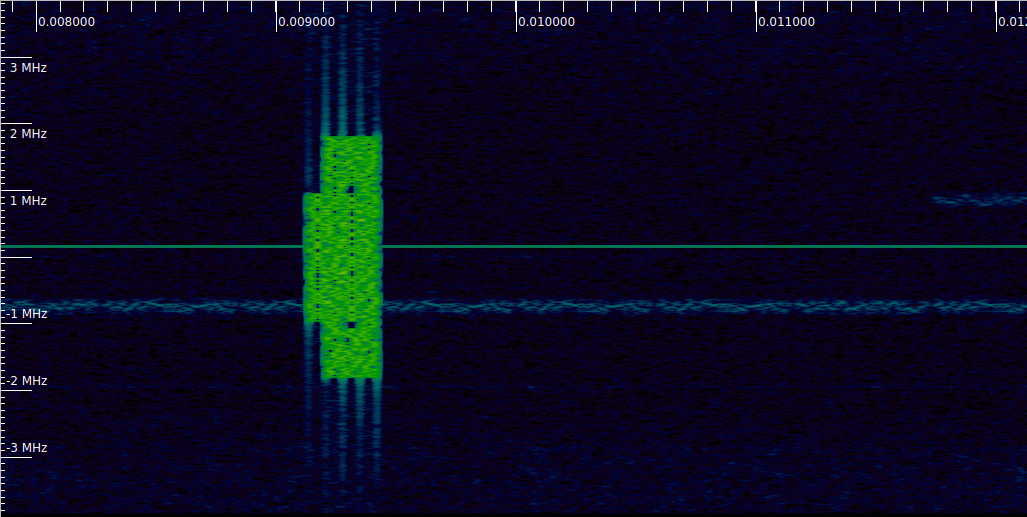
The Jupyter notebook used in this post is here, and the recording in SigMF format can be found in this folder. Here I will only be using the first of Benjamin’s two recordings, since they are quite similar. It was done with an ADALM Pluto at 7.86 Msps and has a duration of 143 ms. The transmitter is an srsRAN 5 MHz cell. The recording was done off-the-air, or maybe with a cabled set up, but there are some other signals leaking in. The SNR is very good, so this is not a problem.
The first signal we find is at 9 ms. There is a transmission like this every 10 ms. As we will see, this is an SS/PBCH block. Something that stands out to those familiar with the LTE downlink spectrum is that the 5G NR spectrum is almost empty. In LTE, the cell-specific reference signals are transmitted all the time. In 5G this is not the case. Downlink signals are transmitted only when there is traffic. There is always a burst of one or several SS/PBCH blocks transmitted periodically (usually every 20 ms, but in this recording every 10 ms), as well as other signals that are always sent periodically (such as the SIB1 in the PDSCH), but this may be all if there is no traffic in the cell.