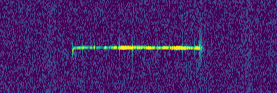
GRAVES is a French space surveillance radar that transmits with very high power at 143.050MHz. It is easy to receive it from neighbouring countries via meteor scatter. During this year’s Perseids meteor shower I did a recording of GRAVES and the 2m Amateur band for later analysis. The recording was done at 08:56 UTC of Saturday 12th August and it is about 1 hour and 34 minutes long. Here I present an algorithm to detect and extract the meteor scatter pings from GRAVES.
Category: Amateur radio
Trying to make the DSLWP-B GMSK decoder more robust
If you’ve being following my latest posts, probably you’ve seen that I’m taking great care to decode as much as possible from the SSDV transmissions by DSLWP-B using the recordings made at the Dwingeloo radiotelescope. Since Dwingeloo sees a very high SNR, the reception should be error free, even without any bit error before Turbo decoding.
However, there are some occasional glitches that corrupt a packet, thus losing an SSDV frame. Some of these glitches have been attributed to a frequency jump in the DSLWP-B transmitter. This jump has to do with the onboard TCXO, which compensates frequency digitally, in discrete steps. When the frequency jump happens, the decoder’s PLL loses lock and this corrupts the packet that is being received (note that a carrier phase slip will render the packet undecodable unless it happens very near the end of the packet).
There are other glitches where the gr-dslwp decoder is at fault. The ones that I’ve identify deal in one way or another with the detection of the ASM (attached sync marker). Here I describe some of these problems and my proposed solutions.
Report for today’s DSLWP-B SSDV session
Today an SSDV transmission session from DSLWP-B was programmed between 7:00 and 9:00 UTC. The main receiving groundstation was the Dwingeloo radiotelescope. Cees Bassa retransmitted the reception progress live on Twitter. Since the start of the recording, it seemed that some of the SSDV packets were being lost. As Dwingeloo gets a very high SNR and essentially no bit errors, any lost packets indicate a problem either with the transmitter at DSLWP-B or with the receiving software at Dwingeloo.
My analysis of last week’s SSDV transmissions spotted some problems in the transmitter. Namely, some packets were being cut short. Therefore, I have been closely watching out the live reports from Cees Bassa and Wei Mingchuan BG2BHC and then spent most of the day analysing in detail the recordings done at Dwingeloo, which have been already published here. This is my report.
DSLWP-B corrupted SSDV frames
In my previous post I looked at the first SSDV transmission made by DSLWP-B from lunar orbit. There I used the recording made at the Dwingeloo radiotelescope and showed how to decode the SSDV frames and produce a JPEG image.
Only four SSDV frames where transmitted by DSLWP-B, and out of those four, only two could be decoded correctly. I wondered why the decoding of the other two frames failed, since the SNR of the signal as recorded at Dwingeloo was very good, yielding essentially no bit errors (even before FEC decoding).
Now I have looked at the signal more in detail and have found the cause of the corrupted SSDV frames. I have demodulated the signal in Python and have looked at the position where an ASM (attached sync marker) is transmitted. As explained in this post, the ASM marks the beginning of each Turbo codeword. The Turbo codewords are 3576 symbols long and contain a single SSDV frame.
A total of four ASMs are found in the GMSK transmission that contains the SSDV frames, which matches the four SSDV transmitted. However, the distance between some of the ASMs doesn’t agree with the expected length of the Turbo codeword. Two of the Turbo codewords where cut short and not transmitted completely. This explains why the decoding of the corresponding SSDV frames fails.
The detailed analysis can be seen in this Jupyter notebook.
This is rather interesting, as it seems that DSLWP-B had some problem when transmitting the SSDV frames. I have no idea about the cause of the problem, however. It would be convenient to monitor carefully future SSDV transmissions to see if any similar problem happens again.
First SSDV transmission from DSLWP-B
As some of you may know, DSLWP-B, the Chinese lunar-orbiting Amateur satellite carries a camera which is able to take pictures of the Moon and stars. The pictures can be downlinked through the 70cm 250bps GMSK telemetry channel using the SSDV protocol. Since an r=1/2 turbo code is used, this gives a net rate of 125bps, without taking into account overhead due to headers. Thus, even small 640×480 images can take many minutes to transfer, but that is the price one must pay for sending pictures over a distance of 400000km.
On Saturday August 3, at 01:27 UTC, the first SSDV downlink in the history of DSLWP-B was attempted. According to Wei Mingchuan BG2BHC, the groundstation at Harbin managed to command the picture download at 436.400MHz a few minutes before the GMSK transmitter went off at 01:30 UTC. A few SSDV frames were received by the PI9CAM radiotelescope at Dwingeloo.
The partial image that was received was quickly shared on Twitter and on the DSLWP-B camera webpage. The PI9CAM team has now published the IQ recording of this event in their recording repository. Here I analyze that recording and perform my own decoding of the image.
DSLWP-B long-term orbit evolution
In my last post I commented that one of the motivations for the periapsis raise manoeuvre of DSLWP-B on July 20 was to prevent the satellite from crashing into the Moon in a few months. When Wei Mingchuan BG2BHC told me this, I found it a bit surprising, since I had the impression that the periapsis had been raising naturally since the satellite was injected in lunar orbit on May 25. Thus, I decided to propagate the orbit for a period of 2 years using GMAT and study the long-term effects in the Keplerian elements.
Update on DSLWP-B eclipse manoeuvre
A few days ago I discussed the manoeuvre performed by DSLWP-B in preparation for the lunar eclipse. The manoueuvre raised the periapsis of DSLWP-B by around 385km. Wei Mingchuan BG2BHC has now informed me that the manoeuvre was performed on 20 Jul 2018 10:47:09.657. There were two motivations for this manoeuvre: first, to avoid eclipse, as I showed in the previous post; second, as Wei tells me, to prevent DSLWP-B from crashing into the Moon in a few months (more on this in a future post).
Wei doesn’t know the delta-v used for the manoeuvre, but estimating it is an easy exercise using GMAT, which is what I will do in this short post. In this simulation I am taking the orbital state for DSLWP-B from the first line of the 20180714 tracking file published in dslwp_dev. I will assume that the manoeuvre was a prograde burn performed at apoapsis that raised the periapsis by 385km. The GMAT script I have used is lunar_eclipse_manoeuvre.script.
First I propagte the orbit to the date mentioned by Wei. I note that the spacecraft is a little short of apoapsis, so I propagate to apoapsis, which happens at 20 Jul 2018 10:49:33.178 UTC. Then I propagate to periapsis and take note of the periapsis radius, which is 3030.91km. Finally, I use GMAT to estimate a burn that will achieve a periapsis radius of 3415.91km using a differential corrector.
The differential corrector finds a delta-v of 17.2m/s. The iterations of the differential corrector can be seen in the figure and text below. A more difficult exercise is to find a burn that stitches together the orbits described by the 20180714 and 20180727a tracking files. I will leave this as an exercise for the reader. Something very similar was done in DSLWP-B’s journey to the Moon: part II.
Trying to decode EQUiSat
EQUiSat is a cubesat from Brown University that was launched to the ISS on May 21 with the Cygnus CRS-9 supply ship. It was released from the ISS on July 13. The payload of EQUiSat is rather interesting: an optical beacon, formed by an array of 4 high power LEDs designed to flash and be visible with the naked eye.
The EQUiSat radio system is also quite interesting and unusual. It uses the PacificCrest XDL Micro transmitter in 4FSK mode. This UHF transmitter is normally used to transmit data between survey GNSS receivers. Unfortunately, there is very little documentation about the radio protocol used by this transmitter.
I am in communication with the satellite team, since they are interested in producing a GNU Radio decoder. However, they don’t know much about the radio protocol either. Here is my first try at trying to decode transmissions from EQUiSat.
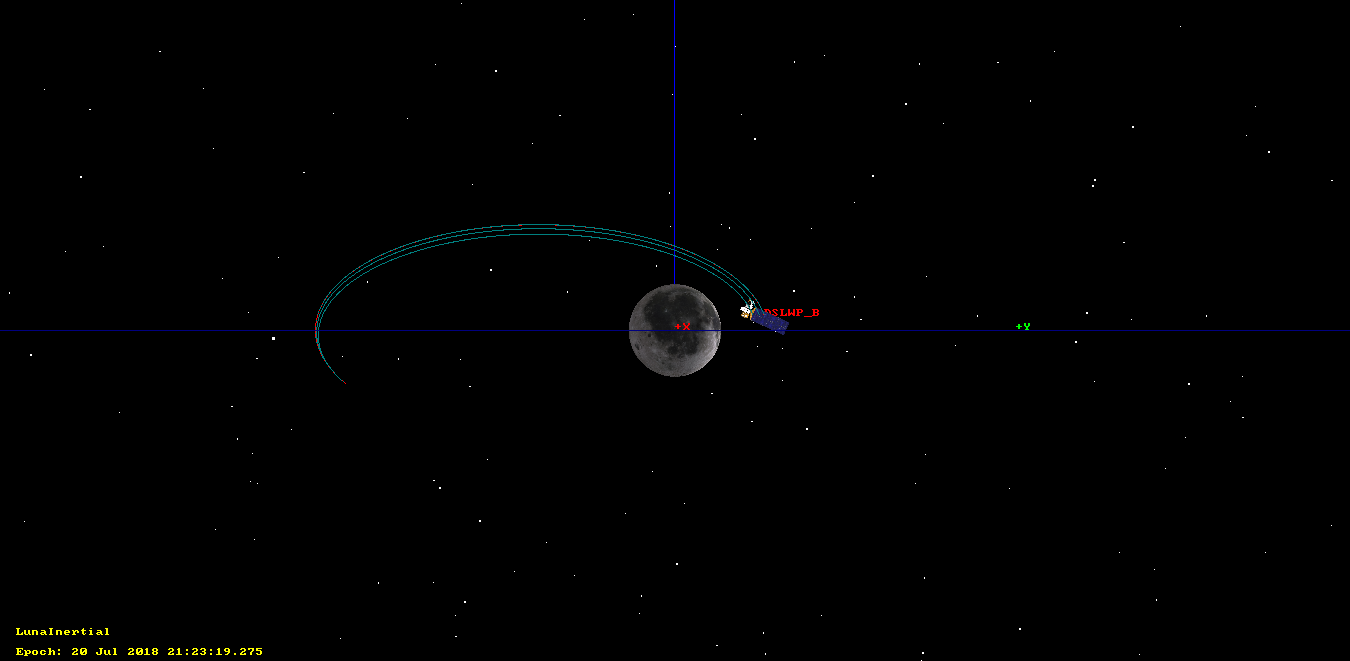
DSLWP-B and the lunar eclipse
As you may well know, last Friday 27th July there was a total lunar eclipse. This is an interesting event for lunar-orbiting spacecraft such as DSLWP-B. In fact, depending on the spacecraft’s orbit, it may also pass through the Earth’s umbra or penumbra. Here I look at the trajectory taken by DSLWP-B during the eclipse.
K2SAT S-band image receiver
K2SAT is a cubesat developed by the Aeroespace Systems and Control Lab in KAIST, a university in Daejeon, South Korea. It will be launched later this year, between September and October. The main mission of the satellite is to test the transmission of images taken with its onboard camera using an S-band QPSK transmitter that supports up to 2Mbps data rate. This will use the 2.4GHz Amateur satellite band, and the satellite has already coordinated a downlink frequency of 2404MHz. The K2SAT team at KAIST is the same one that built the QB50 KR01 (LINK) cubesat.
Since February, I have been collaborating with Pilwon Kwak and the rest of the K2SAT team to produce a GNU Radio receiver for the S-band image downlink and add it to my gr-satellites project. This receiver has now been publicly released. Here I explain the main details of the transmitter and protocol used by K2SAT and the implementation of the receiver.