A few days ago, I spoke about the future impact of DSLWP-B on the lunar surface, which will happen in the far side of the Moon around the end of July, and how the spacecraft could be manoeuvred to make the impact point fall on the near side of the Moon instead, so that it can be observed from Earth.
Philip Stooke made a very good remark in the comments saying that the impact might have been planned on the far side of the Moon deliberately in order to avoid Apollo landing sites and other heritage sites. This is a very valid concern. By all means, the crash should be planned to avoid disturbing heritage sites or other areas of specific interest.
There is a saying that goes like “even a broken clock is right twice a day”. In the same spirit, even a QO-100 station, which is installed with a fixed dish aiming to Es’hail 2, can sometimes be used for observing the Moon, as it happens to pass in front of the beam.
My station has a 1.2m offset dish with a GPSDO disciplined LNB. There are a few things that can be done when the Moon passes in front of the beam of the dish, such as measuring moon noise (though the increase in noise is only of around 10K with such a small dish), or receiving the 10GHz EME beacon or other EME stations. Therefore, it is interesting to know when these events happen, in order to prepare the observations.
I have made a simple Jupyter notebook that uses Astropy to compute the moments when the moon will pass through the beam of the dish (say, closer than 1º to the position of Es’hail 2 in the sky). Of course, the results are highly dependent on the location of the groundstation, so these are only valid for my groundstation and perhaps other groundstations in Madrid. Other people can run this notebook again using their data.
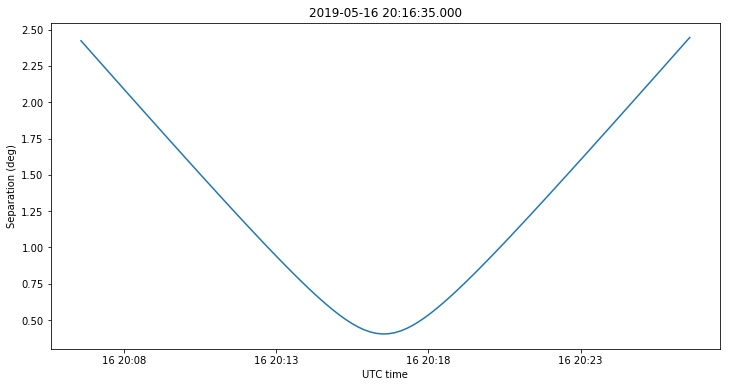
It turns out that each year the Moon passes roughly a dozen times in front of the dish beam. The next observation for me is on May 16. The separation in degrees between the centre of the Moon and the centre of the dish beam can be seen in the figure below.
This notebook can be used to plan for transits of other astronomical objects, but besides the Moon and the Sun, there are no other objects that are visible at 10GHz with a small dish. It is well known when the Sun passes in front of the beam, since this disturbs communications with GEO satellites. This is called Sun outage and it happens during a few days around the equinoxes (a few weeks sooner or later, depending on the latitude of the station). On the other hand, the transits of the Moon happen throughout the whole year, at rather unpredictable moments, so I think this notebook is quite useful to plan observations.
As you may know, I am on a scientific expedition in Antarctica until mid-February. Currently I am in the Spanish base Gabriel de Castilla, where we have relatively good satellite internet access. As I have some free time here, I have updated the DSLWP-B camera planning to reflect the upcoming observations announced by Wei Mingchuan BG2BHC on 2019-02-03 14:30 and 2019-02-04 08:20.
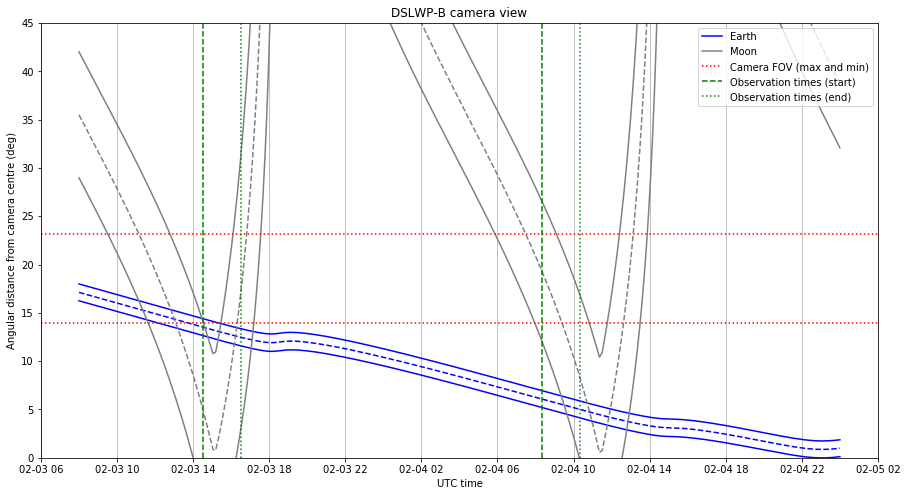
As we can see in the figure below, the Earth will be very near to the centre of the image, since there is a new Moon on February 4 (recall that the DSLWP-B camera points away from the Sun, so the Earth is visible on the camera when there is a new Moon, as the Earth is then opposite to the Sun, as seen from the Moon).
The observation times have been selected taking into account the orbit around the Moon, so that the Moon is also visible on the image. On February 3 the Moon should be completely visible inside the camera field of view. On the contrary, on February 4, the Moon will only be partially visible inside the frame.
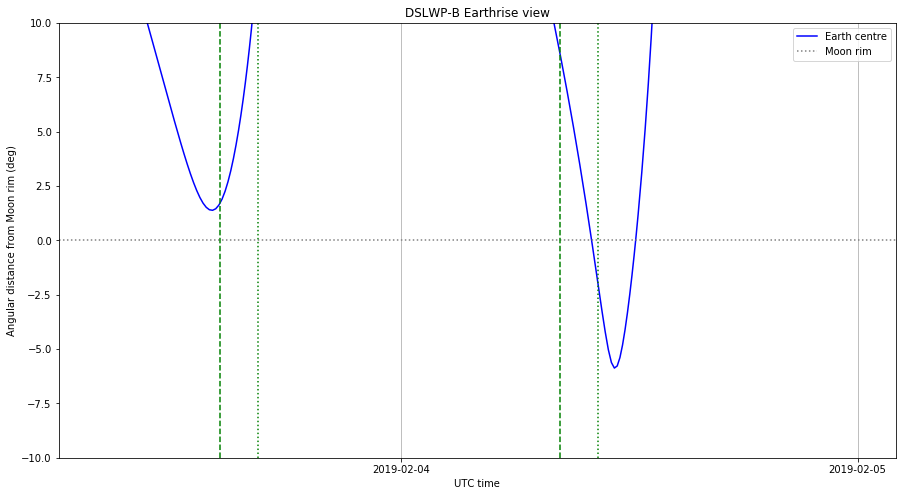
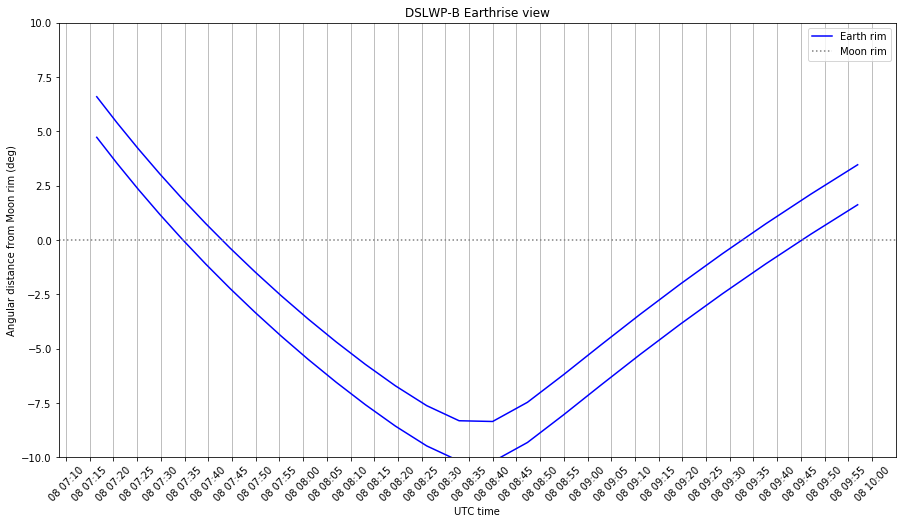
The figure below shows the angular distance between the centre of the Earth and the rim of the Moon. This kind of graph can be used to compute the times when the Earth crosses the Moon rim, allowing us to take an “Earthrise” image. There is an Earthrise event on February 4, during the time when the Amateur payload is active. Generally, an image is taken whenever the Amateur payload powers up, but in this case it could be possible to command the payload manually to take an image near the Earthrise event.
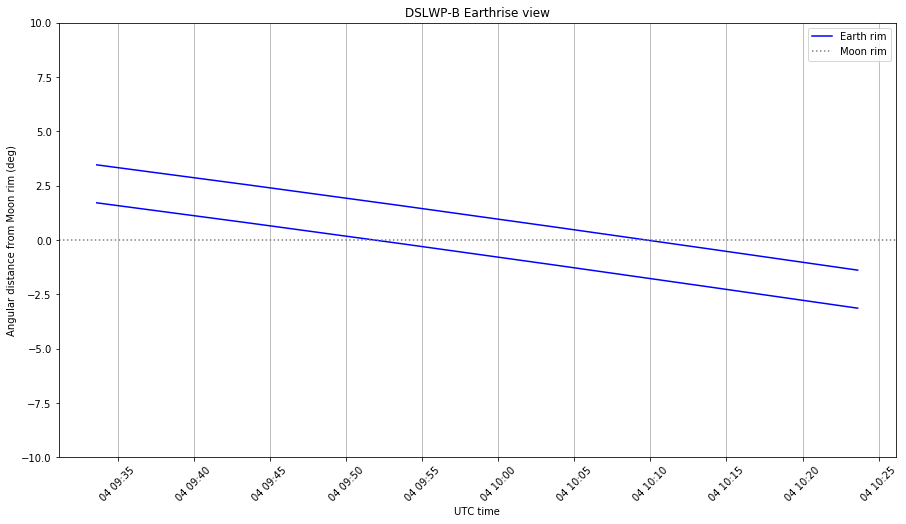
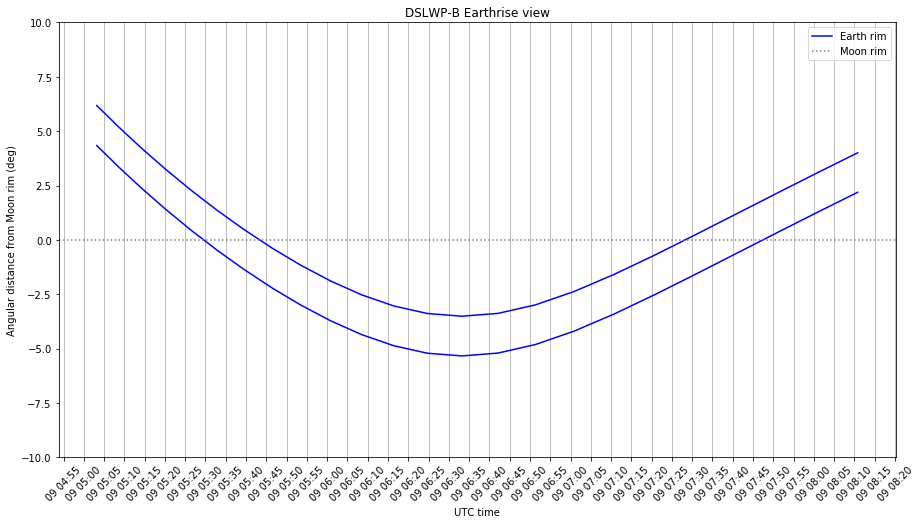
The figure below shows in detail the Earthrise event, with both edges of the Earth plotted. It seems that a good time to take the Earthrise image is on 2019-02-04 10:00 UTC.
It is again the beginning of the month, which means that the Earth will be in view of the Inory eye camera on board DSLWP-B. As usual, I have updated my camera planning notebook to compute the location of the Moon and Earth, as seen from the camera.
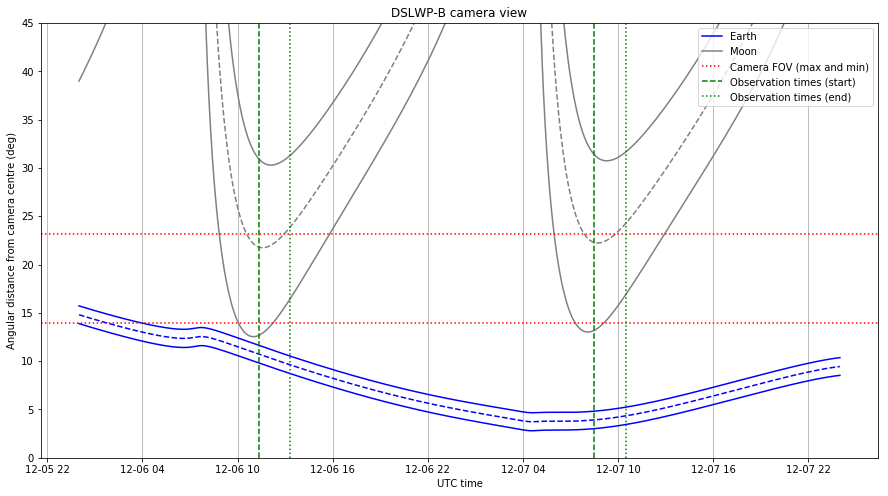
Wei has already scheduled observations on 2018-12-06 11:20 UTC and 2018-12-07 08:30 UTC. On each of these observations, an image will be taken at the start of the observation and the UHF transmitter will be activated for 2 hours.
I have used the 20181128 tracking file from dslwp_dev as orbital state for the calculations. As the date of the observations comes nearer, I might rerun the computations with updated ephemeris data, but this time it doesn’t seem critical to estimate the orbit with precision. In November, there were occultations of the Earth behind the lunar disc, and the times for these depended a lot on the orbital state. In December there will be no occultations, however.
The figure below shows the prediction for the camera view in the scheduled observations. On the 6th, the Earth will come close to the edge of the Moon. On the 7th, the Earth will be closest to the camera centre since we started planning and taking images in October.
The title of this post is quite a mouthful (I couldn’t come up with anything better), so let me start by describing the particular problem that got me thinking into this sort of things.
In my last post, I detailed the DSLWP-B camera planning for the beginning of November. There, I used orbital state taken from the 20181027 tracking file to compute good times to take images of the Moon and the Earth, especially looking for an Earthrise-like image.
Now that the planned dates are closer, it is good to rerun the calculations with a newer orbital state. It turns out that there has been an important change in the mean anomaly, which shifts all the predictions by a few hours.
I have spoken in other occasions about planning the appropriate times to take pictures with the DSLWP-B Inory eye camera. In the beginning of October there was a window that allowed us to take images of the Moon and Earth. A lunar month after this we have new Moon again, so it is an appropriate time to take images with the camera.
This time, the Moon will pass nearer to the centre of the image than on October, and at certain times the Earth will hide behind the Moon, as seen from the camera. This opens up the possibility for taking Earthrise pictures such as the famous image taken during the Apollo 8 mission.
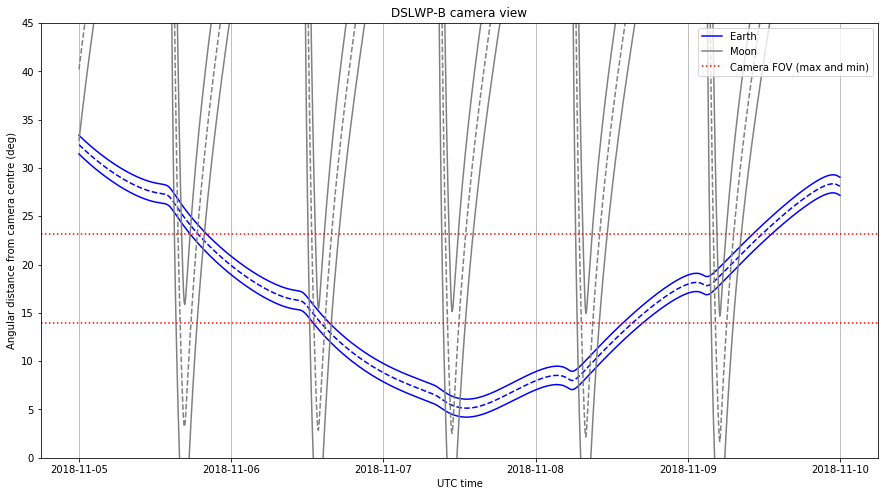
I have updated my camera planning Jupyter notebook to compute the appropriate moments to take images. The image below shows my usual camera field of view diagram.
The vertical axis represents the angular distance in degrees between each object and the centre of the image (Assuming the camera is pointing perfectly away from the Sun. In real life we can have a couple degrees of offset). The red lines represent the limits of the camera field of view, which are measured between the centre and the nearest edge, and between the centre and one corner. Everything between these two lines will only appear if the camera rotation is adequate. Everything below the lower line is guaranteed to appear, regardless of rotation.
We see that between November 6th and November 9th there are four times when the camera will be able to image the Earth and the Moon simultaneously. On the 6th it is almost guaranteed that the Earth will appear inside the image, and on the 9th it depends on the orientation of the camera. On the 7th and 8th it is guaranteed that the Earth will be in the image.
To compute appropriate times for taking an Earthrise picture, I have made the graph below. This shows the angular distance between the Earth and the rim of the Moon. If the distance is negative, the Earth is hidden by the Moon. We see that the Earth hides behind the lunar disc on each of the four days mentioned above.
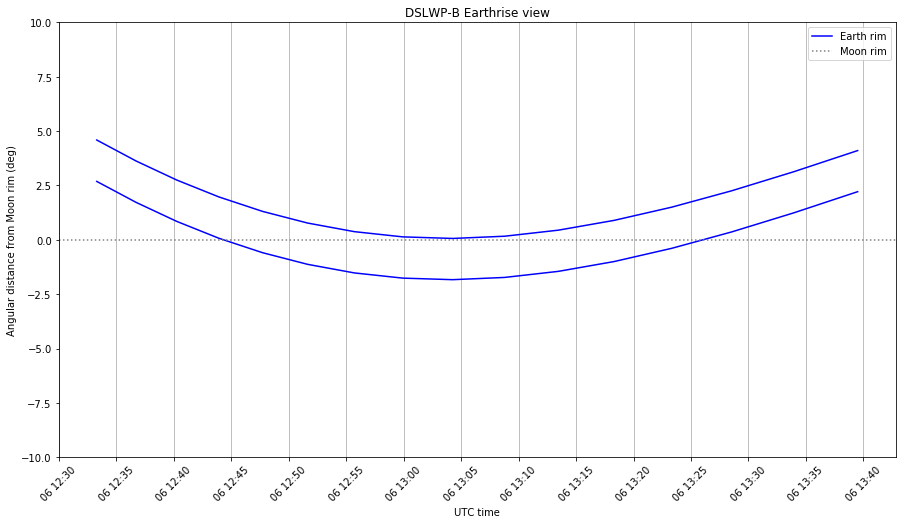
In the figures below, we zoom in each of the events. In this level of zoom we can plot the “inner” and “outer” Earth rim, so we can see when the Earth is partially hidden by the Moon.
On November 6th the situation is the most interesting in my opinion. It turns out the the Earth will not even hide completely between the Moon. In theory, a tiny sliver will remain visible. Also, it will take more time for the Earth to hide behind the Moon and then reappear. As we will see, the next days this will happen faster. Here, it takes 15 minutes for the Earth to hide, and another 15 minutes to reappear. It spends 10 minutes almost hidden.
It can be a good idea to take a series of 10 images with an interval of 5 minutes between each image, and spanning from 12:40 UTC to 13:30 UTC, to get a good coverage for this event.
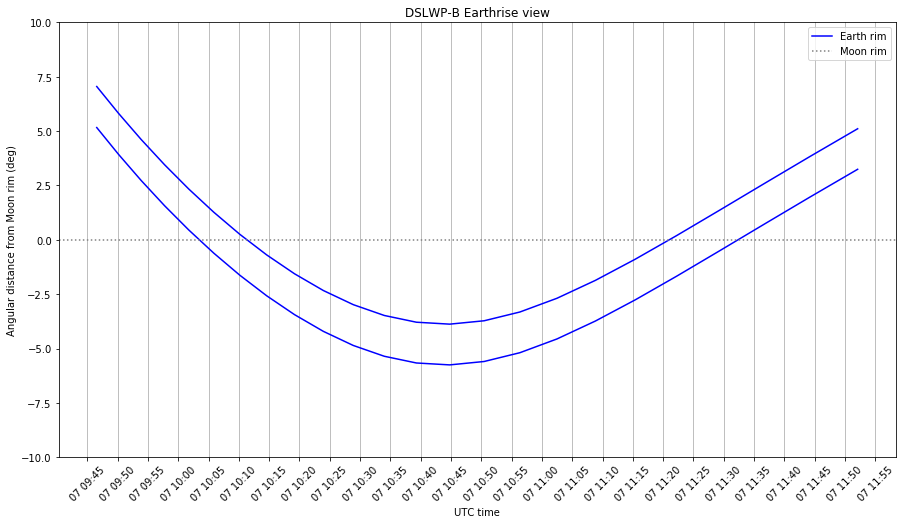
On November 7th the Earth goes deeper into the lunar disc, taking 5 minutes to hide, spending 70 minutes hidden, and taking 10 minutes to reappear.
On November 8th the Earth goes even deeper into the lunar disc. It takes around 7 minutes to hide, spends 105 minutes hidden and takes 10 minutes to reappear.
On November 9th the configuration is quite similar to November 7th, but the hiding speed is slower. It takes 15 minutes to hide, spends 100 minutes hidden and takes 15 minutes to reappear.
Overall, I think that the best would be to take a good series of images on November 6th, since this shallow occultation is a rarer event. The challenge will be perhaps to download all the images taken during these days. On average, I think we are downloading around 2 new images per 2 hour activation, taking into account repeats due to lost blocks and dead times. DSLWP-B is able to store 16 images onboard, and every time the UHF transmitter comes on, a new image is taken, overwriting an old image (more information in this post). Thus, if we take many images during these days, we have the danger of overwriting some when trying to download them over the next few days.
Perhaps a good strategy is to arrange for a series of 10 images to be taken on the 6th, and then programming the UHF transmitter to take an image as the Earth comes out of its occultation on the 7th, 8th and 9th. In this way, the 2 hour periods of these three days can be used to download some of the images taken on the 6th, and there are still 3 images of margin in the buffer in case something goes wrong during the downloads over the next few days.
In my previous post I showed that during the DSLWP-B observation on 2018-10-27 17:20 UTC, the orbit of DSLWP-B would take it behind the Moon. This doesn’t happen every orbit (read as every day, since the orbit period is around 22 hours). It depends on the angle from which the orbit is viewed from Earth, and hence on the lunar phase.
Knowing beforehand when DSLWP-B will hide behind the Moon allows to perform radio occultation studies. These consist in measuring the RF signal from DSLWP-B as it gets blocked by the lunar disc. Interesting phenomena such as diffraction can be observed.
I have calculated the occultations that will be visible from the Dwingeloo radiotelescope in the remaining part of this year.
In my previous post, I wondered about what was the field of view of the Inory eye camera in DSLWP-B. Wei Mingchuan BG2BHC has answered me on Twitter that the field of view of the camera is 14×18.5 degrees. However, he wasn’t clear about whether these figures are measured from the centre of the image to one side or between two opposite sides of the image. I guess that these values are measured from the centre to one side, since otherwise the total field of view of the camera seems too small.
Here I measure the field of view of the camera using the image of Mars and Capricornus taken on August 4, confirming that these numbers are measured from the centre of the image to one side, so the total field of view is 28×37 degrees.