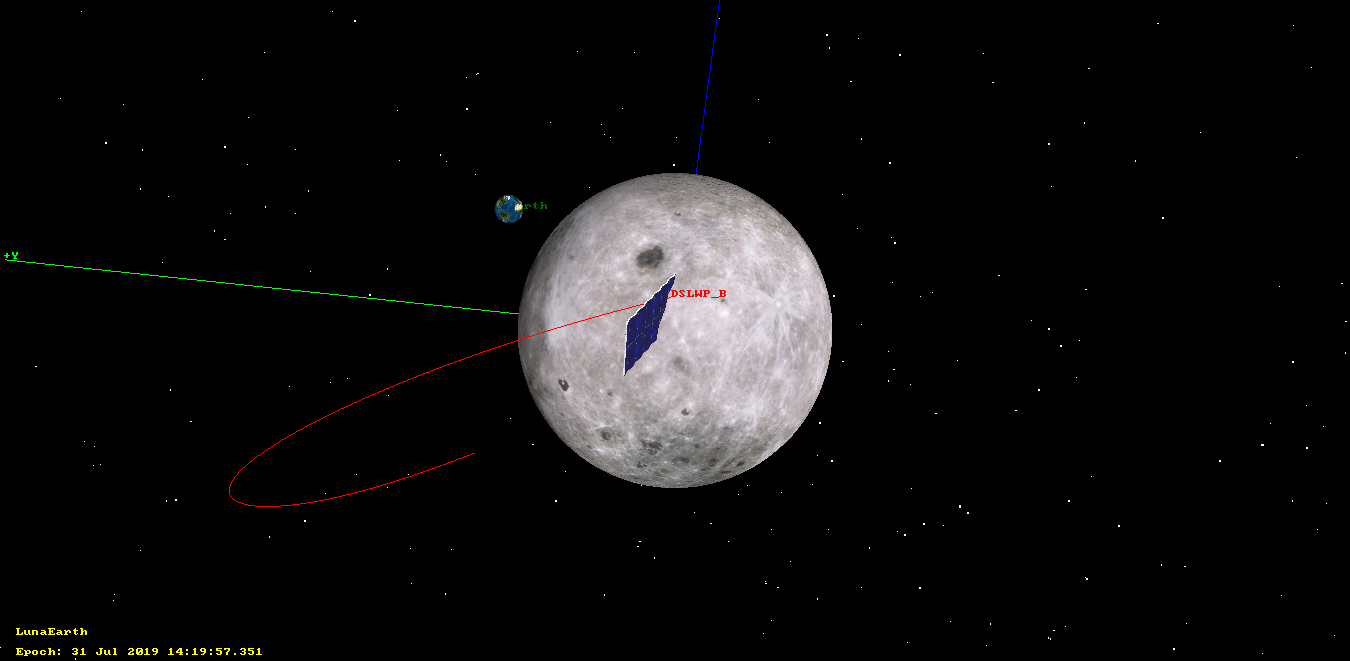
As you may well know, DSLWP-B, the Chinese lunar orbiting Amateur satellite crashed with the Moon on July 31 as a way to end its mission without leaving debris in orbit. I made a post with my prediction, which showed the impact point southeast of Mare Moscoviense, in the far side of the Moon. Phil Stooke was more precise and located the impact point near the Van Gent crater.
Our plan is to get in contact with the LRO team and try to find the crash site in future LRO images. We are confident that this can be done, since they were able to locate the Beresheet impact site a few months ago. However, to help in the search we need to compute the location of the impact point as accurately as possible, and also come up with some estimate of the error to define a search area where we are likely to find the crash. This post is a detailed account of my calculations.