Even though I haven’t been posting updates about Chang’e 5 lately, we have continued tracking it with Allen Telescope Array most weekends since my last post. The main goal of these observations has been to give Bill Gray updated pointing data so that he can refine his ephemerides. Additionally, we have been decoding telemetry from the recordings we’ve made.
One of the interesting things that have happened is the change to a lower baudrate in the telemetry signals. Until 2020-12-27 the baudrate was 4096 baud, while starting with the observation on 2021-01-02 we are seeing a new baudrate of 512 baud. This means that at some point around the end of last year the spacecraft was commanded to switch to a lower baudrate, to account for the increase in path loss caused by the increasing distance as the spacecraft travels towards the Sun-Earth L1 point.
The new baudrate gives an increase in Eb/N0 of 9dB, which is very helpful to continue decoding with ATA. In fact, using a single 6.1 metre dish and adaptive polarization, the signal is decodable with a some small link margin. Decoding is usually good, but can drop out when the noise level increases. Thus the change in baudrate suggests that the Chinese DSN is interested in tracking this spacecraft with smaller antennas. For instance, the 18 metre antennas at Qingdao and Kashgar should have 9dB of advantage over an ATA dish, and the larger antennas should have plenty of SNR to decode even the 4096 baud signal.
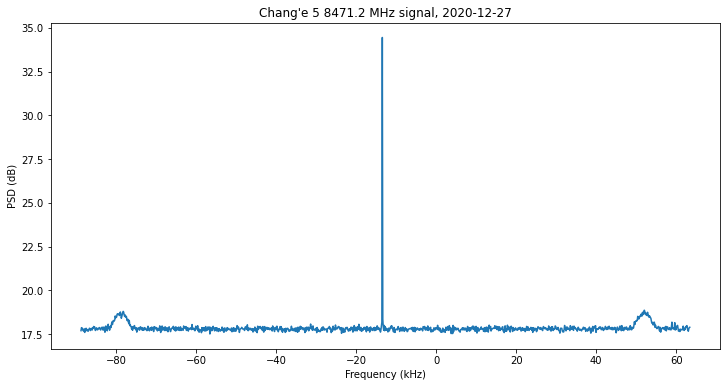
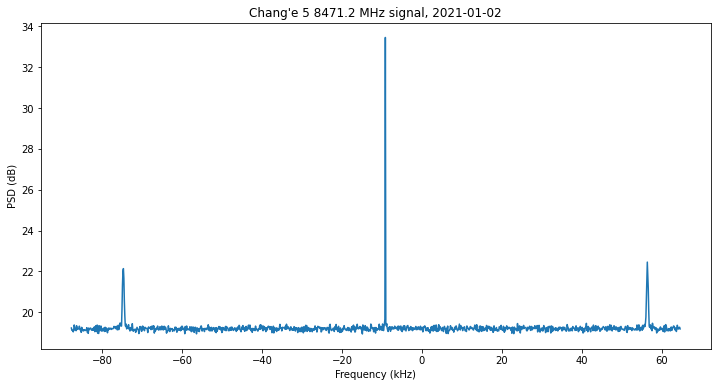
The change in baudrate is very clear in the spectrum of the signal. The figures below show spectrums obtained from the ATA recordings done on 2020-12-27 (4096 baud) and 2021-01-02 (512 baud). We see that the data sidebands are much narrower with 512 baud.
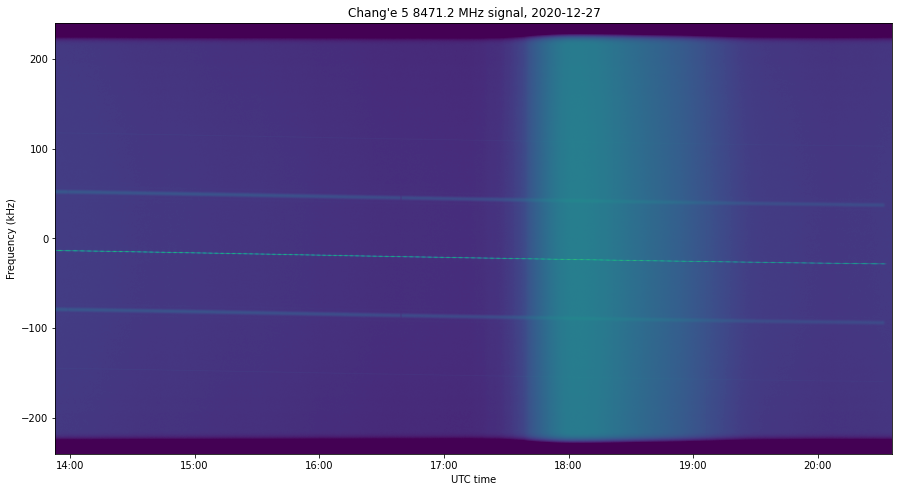
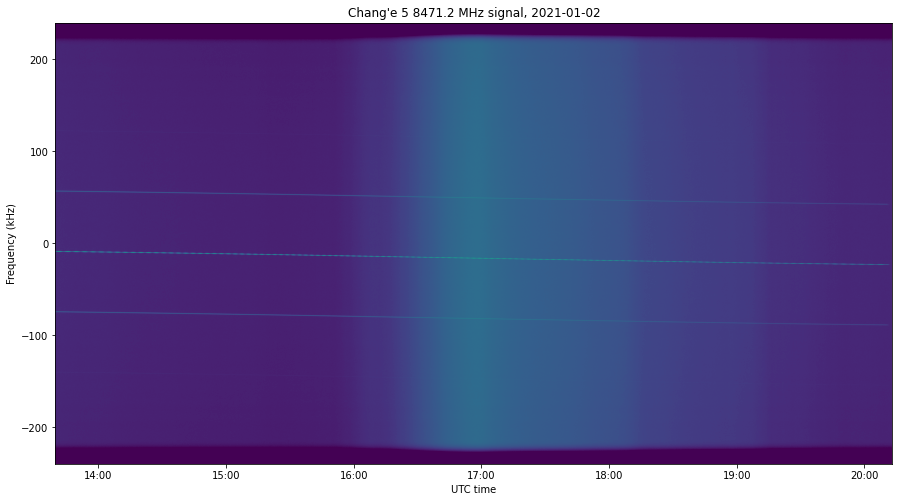
This change can also be seen in the waterfalls.
The framing of the 512 baud signal is exactly the same as before: concatenated CCSDS packets with a payload of 220 bytes. Therefore, each frame now takes 8 seconds to transmit. I have adapted my GNU Radio decoder and made a flowgraph for the 512 baud signal.
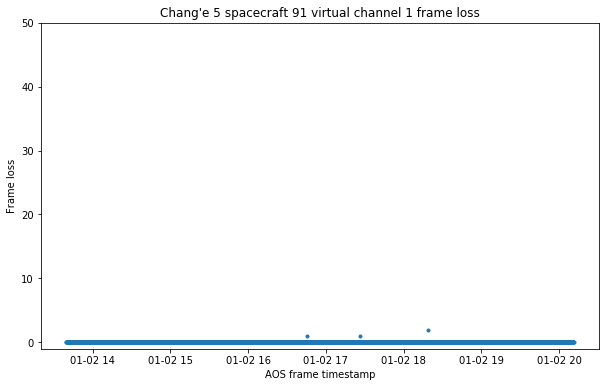
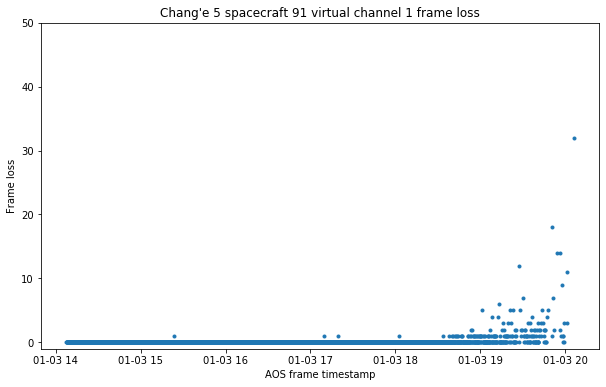
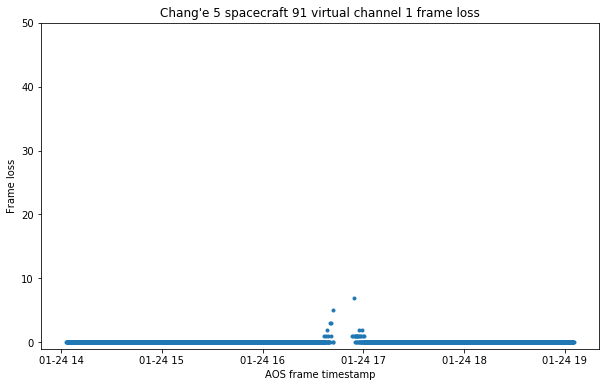
The figures below show the frame loss in the decoded frames (according to jumps in the virtual channel frame count). We can see how the 4096 baud signal gives occasional frame loss, while the 512 baud signal gives error free decodes except for some gaps on January 23 and 24, which are most likely caused by a sudden increase in receiver noise (as seen in the waterfalls above).


The decoded frames contain only data from virtual channel 1, which transmits real time telemetry. The data is very similar to that analysed in my previous post and mostly static, so it isn’t very interesting. I have updated the Github repository with the Jupyter notebooks containing the analysis of these frames. The repository also includes the data files with the frames. Additionally, I have updated the ata_notebooks repository with the polarization analysis of some of these recordings.
3 comments