A few days ago, Paul Marsh M0EYT told me that he had seen something interesting in his recording of Tianwen-1‘s signal during the previous night. Paul usually does some nice videos of the signal waterfall by doing screen captures of Spectrum Lab. These clearly show events such as frequency jumps due to groundstation locking, and any high-speed data transmissions. You can see some of these in his Twitter feed.
The waterfall that Paul talked me about can be seen in this video. It corresponds to the night between September 20 and 21. Note that the data sidebands show some horizontal stripes. For a while they disappear altogether, and at other times their density changes. This is what caught Paul’s eye.
Tianwen-1 waterfall between 2020-09-20 and 2020-09-21 by Paul Marsh M0EYT
Paul was convinced that when the stripes disappeared, more data was being transmitted in the signal. I was a bit sceptical about it, but clearly there was something changing in the signal. I thought about the “dancing” related to the subcarrier and data clocks sliding. However, after analysing the signal, I saw that Paul was completely right, as I will explain here. After knowing exactly what happens, I’m still quite amazed that this shows up in the Spectrum Lab waterfall.
Last Sunday September 20, around 14:15 UTC, I published a post with an update on Tianwen-1‘s attitude during the mission. I mentioned that we were expecting to see an attitude change to prevent the high-gain antenna from exceeding its maximum slew range. I also mentioned that we were expecting the second trajectory correction manoeuvre (TCM-2) to happen sometime in September according to Chinese media.
Apparently the timing of my post was quite appropriate, because shortly afterwards, at 15:00 UTC (23:00 Beijing time), Tianwen-1 executed its TCM-2. However, news of this didn’t appear until the next morning, at 7:00 Beijing time (23:00 UTC). Unfortunately the manoeuvre happened when the spacecraft wasn’t in view from Europe, so we don’t have Doppler data as for TCM-1. In any case, we can use the state vectors transmitted in the telemetry to study the manoeuvre, by comparing the vectors received before the burn and those received after the burn. In this post I look at this and check if it matches the news report.
A month ago I posted about the ADCS telemetry of Tianwen-1 and how it was controlling its attitude on its cruise orbit to Mars. Since then, AMSAT-DL has been collecting telemetry data from Tianwen-1 using the 20m antenna at Bochum observartory almost all the time that the spacecraft is in view from Germany. This short post is an update with the results collected so far.
Tianwen-1’s attitude is controlled by maintaining the spacecraft’s Y axis (on which the solar panels lie) perpendicular to the plane formed by the Sun, Earth and spacecraft, and by maintaining a fixed angle between the spacecraft’s X axis and the Sun vector. This is done to prevent the solar panels from having to steer constantly to track the Sun.
The figure below shows the angle between the Sun vector an the X axis using all the telemetry collected as of writing this post. We see that the Sun angle was fixed to 0 degrees at the start of the mission, then was changed to -15 degrees for a few days, and finally has been kept at -20 degrees since the beginning of August.
All the dots shown in this picture correspond to telemetry recorded either at Bochum or by Paul Marsh M0EYT. Many thanks to all people involved for their continuous effort in recording telemetry data.
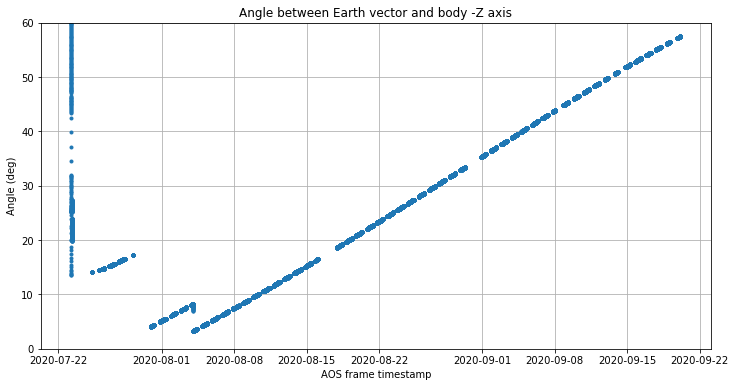
Since the Sun-Earth angle, as seen from the spacecraft, changes as the spacecraft travels along the transfer orbit, and the spacecraft maintains a fixed Sun angle, the Earth angle keeps changing. The high-gain antenna is placed on the -Z axis according to diagrams of the spacecraft. However, the antenna can slew to track the Earth. The figure below shows the angle between the Earth vector and the -Z axis, which is precisely the slew angle needed to point the high-gain antenna.
We see that this slew angle keeps increasing with time. The slew angle of the antenna is limited mechanically, though we don’t know the maximum slew angle. At some point, the spacecraft will have to yaw and reduce its Sun-to-X angle in order to reduce the slew angle to an acceptable value. This is one of the events we are hoping to capture soon in the telemetry.
I don’t know the reason why the spacecraft yawed two times near the beginning of the mission. At first, I thought that the antenna slew was limited to perhaps 20 degrees, so the spacecraft would need to yaw every couple of week to maintain an acceptable antenna slew. Now it is clear that this is not the case, since the slew angle is near 60 degree. It may happen that the spacecraft was yawed for thermal reasons.
The other event we are expecting is the second correction manoeuvre, which according to some sources will happen in September. So far we haven’t seen any indication of this in the telemetry, so stay tuned for more news.
The updated Jupyter notebook where these plots have been made is here.