A month ago I posted about the ADCS telemetry of Tianwen-1 and how it was controlling its attitude on its cruise orbit to Mars. Since then, AMSAT-DL has been collecting telemetry data from Tianwen-1 using the 20m antenna at Bochum observartory almost all the time that the spacecraft is in view from Germany. This short post is an update with the results collected so far.
Tianwen-1’s attitude is controlled by maintaining the spacecraft’s Y axis (on which the solar panels lie) perpendicular to the plane formed by the Sun, Earth and spacecraft, and by maintaining a fixed angle between the spacecraft’s X axis and the Sun vector. This is done to prevent the solar panels from having to steer constantly to track the Sun.
The figure below shows the angle between the Sun vector an the X axis using all the telemetry collected as of writing this post. We see that the Sun angle was fixed to 0 degrees at the start of the mission, then was changed to -15 degrees for a few days, and finally has been kept at -20 degrees since the beginning of August.

All the dots shown in this picture correspond to telemetry recorded either at Bochum or by Paul Marsh M0EYT. Many thanks to all people involved for their continuous effort in recording telemetry data.
Since the Sun-Earth angle, as seen from the spacecraft, changes as the spacecraft travels along the transfer orbit, and the spacecraft maintains a fixed Sun angle, the Earth angle keeps changing. The high-gain antenna is placed on the -Z axis according to diagrams of the spacecraft. However, the antenna can slew to track the Earth. The figure below shows the angle between the Earth vector and the -Z axis, which is precisely the slew angle needed to point the high-gain antenna.
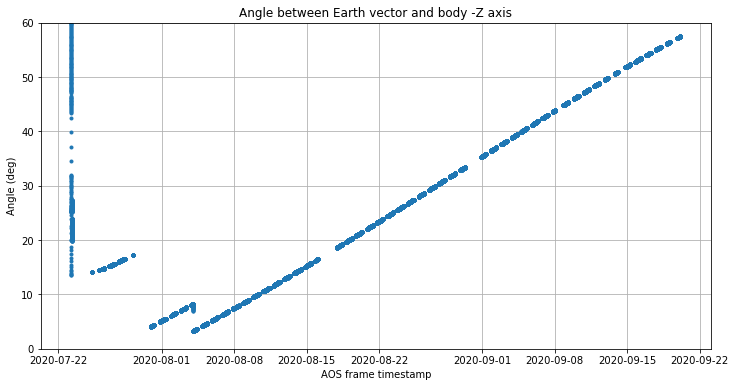
We see that this slew angle keeps increasing with time. The slew angle of the antenna is limited mechanically, though we don’t know the maximum slew angle. At some point, the spacecraft will have to yaw and reduce its Sun-to-X angle in order to reduce the slew angle to an acceptable value. This is one of the events we are hoping to capture soon in the telemetry.
I don’t know the reason why the spacecraft yawed two times near the beginning of the mission. At first, I thought that the antenna slew was limited to perhaps 20 degrees, so the spacecraft would need to yaw every couple of week to maintain an acceptable antenna slew. Now it is clear that this is not the case, since the slew angle is near 60 degree. It may happen that the spacecraft was yawed for thermal reasons.
The other event we are expecting is the second correction manoeuvre, which according to some sources will happen in September. So far we haven’t seen any indication of this in the telemetry, so stay tuned for more news.
The updated Jupyter notebook where these plots have been made is here.
Thanks for the update – very interesting!
>>> I don’t know the reason why the spacecraft yawed two times near the beginning of the mission
… is there any precedent for a spacecraft to “exercise” its attitude control capabilities early in a mission just to verify that everything is working properly? Or, to perhaps set a metric to use for future manoeuvres?
Yes! Many things are tested in orbit. For example the first trajectory correction manoeuvre was just a test of the main thruster. But if changing the attitude just for a test it would make sense to change it back to the appropriate attitude after the test.
Regarding future manoeuvres, it is unlikely that the spacecraft is already oriented appropriately for the next trajectory correction. A correction burn usually involves rotating to the appropriate attitude, firing the thruster, and then rotating back to the nominal attitude.