A few days ago, I talked about the radiosondes that are launched every 12 hours from Madrid-Barajas Airport. Yesterday, I went with my mother on a trip to try to recover the radiosonde that was launched at 11:00UTC. This radiosonde managed to ascend to 31000m before bursting. This is quite high for a radiosonde of this kind, as they usually burst between 24000 and 28000m.
We left home at 13:00UTC, so the radiosonde was quite far from us by that time. The last telemetry we managed to decode was when the radiosonde was 3800m high and on its way down. It was flying over Sacedón, in Guadalajara, and slowly drifting eastwards along the road. We were still on our way to Guadalajara, more than 40km away.
Nevertheless, we decided to drive to Sacedón and continue along the road for a while to see if we could hear the radiosonde again. Our main concern was how long would the battery in the radiosonde last. The manufacturer states that it lasts 135 minutes. Clearly, this is way underestimated, and there are reports that it lasts 3 hours or more. Still, it was already past 14:00UTC.
When we passed Sacedón, we started to hear the radiosonde again very weakly. We stopped at the first road exit we found, as our best bet was to pull out the yagi and try to decode the GPS telemetry or at least get a bearing on the signal. The signal with my 7 element UHF yagi (the Arrow satellite antenna) was just barely decodable. The GPS location pointed to a spot about 500m away in the nearby fields. The radio bearing also pointed in that direction.
Upon reaching the spot marked by the GPS, the bearing with the yagi continued to point in the same direction as before. The signal strength had increased a bit, indicating that we were going in the right direction, but we had still to walk some distance. We continued to track the radiosonde transmission with the yagi.
This drove us into an area overgrown with shrubs and trees. Advancing through that area was difficult and slow. Eventually, I managed to find the radiosonde in an area covered with many trees. The burst balloon and the radiosonde had fallen to the ground about 20m apart and the thread that joins them was hanging horizontally between some trees. It was that thread the first thing I spotted, hanging at eye level just before me.
Below you can see the recovered balloon material and the parachute (after bringing them home). The bottom part of the balloon is mostly intact, but most of the top part has burst into many spaghetti-like filaments which tangled with the parachute strings and managed to descend with the whole packet.

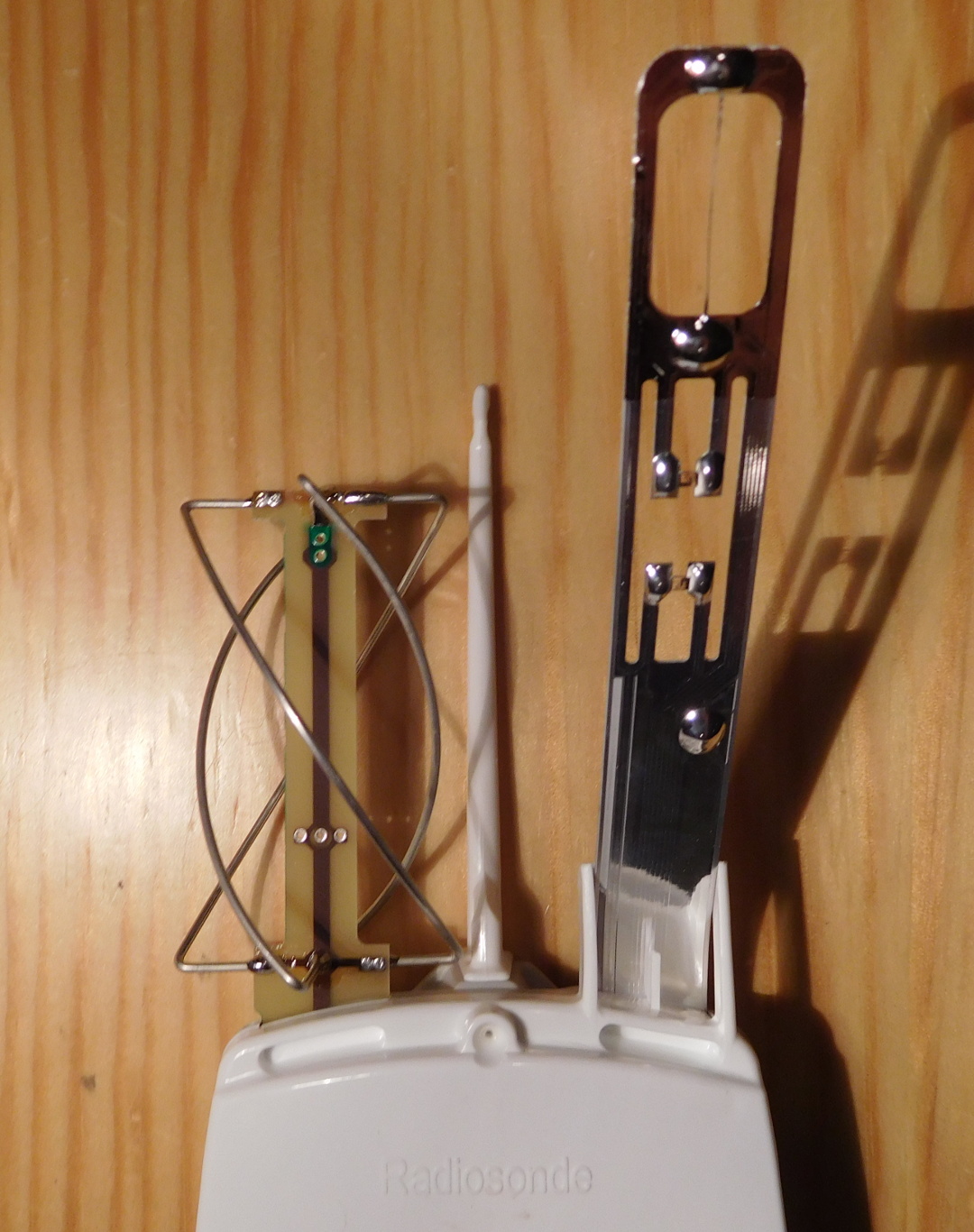
This is the radiosonde package. On the top, from left to right, it has a GPS antenna, a tying point for the thread that ties it to the balloon and the instrument boom. On the bottom, from left to right, it has a 5×2 pin male header connector for an external instrument (normally, an ozone sensor), the UHF quarter-wave monopole antenna, and a PCB edge 2×6 connector that is used to connect the radiosonde to the base station before flight to do the configuration and some calibration.

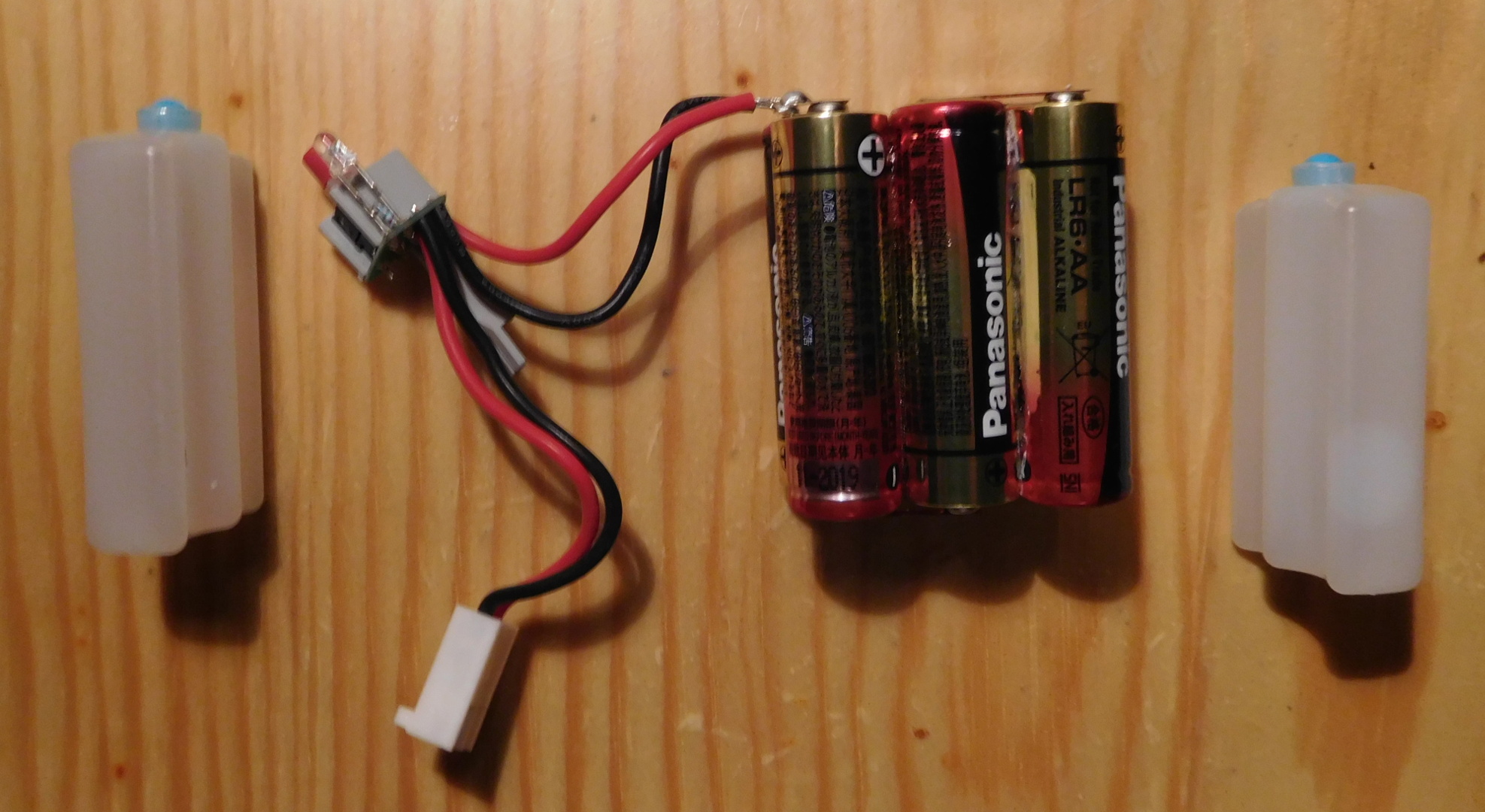
The battery pack is attached to the bottom of the unit. This battery pack consists of 6 alkaline 1.5V AA batteries, for a nominal voltage of 9V. There is also the option of a lithium-based battery pack. Regarding the battery duration of the radiosonde, it was still transmitting 9 hours after launch, when I disassembled the unit. The voltage on the pack was 6.68V, so still there is some remaining capacity. This morning, I plugged the pack again and the unit refuses to transmit. Apparently it enters a power-saving mode if the voltage is below 7V. The unit transmits fine if I plug it into a fresh 9V battery.
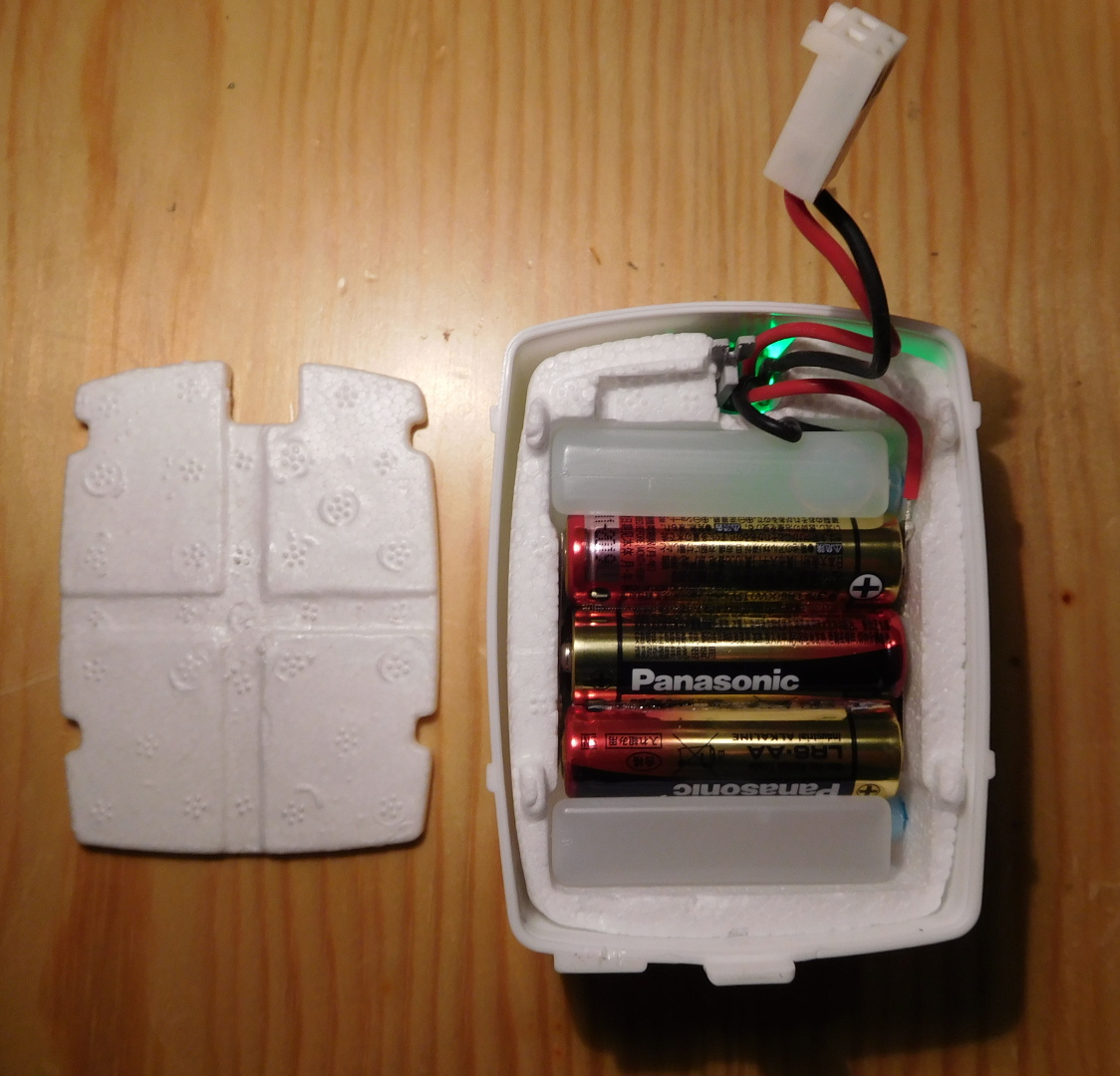
The battery pack has a small switch to turn it on or off and a green LED that glows when the pack is on. I am not sure what the two plastic containers are for. They seem to contain water or a similar liquid. Probably they are included there for thermal reasons, to help the battery maintain the heat. The unit needs to survive to temperatures below -50ºC.
The GPS antenna is a backfire quadrifilar helical antenna. It is right-hand circularly polarized. This is good because reflections of GPS signals will be left-hand circularly polarized. Reflections are a source of errors in the GPS system so a right-hand antenna helps to reject them. In contrast to a usual helical antenna, which would turn clockwise for right-handed polarization, this antenna turns counter-clockwise. This is because the antenna uses the backfire pattern. The feedpoint is at the top of the antenna, which points to the zenith when the unit is flying, and the helix is pointing down to the nadir.
The sensor boom contains the following sensors, from top to bottom. The first is the temperature sensor, which is a very fine wire to provide very low thermal capacitance. The second are two humidity sensors, which are heated during normal use. The small bulge is a thermistor, as this teardown video shows. I’m not sure what it is used for. Perhaps to regulate the heating of the sensor boom. The pressure sensor is not on the boom, but inside the unit.
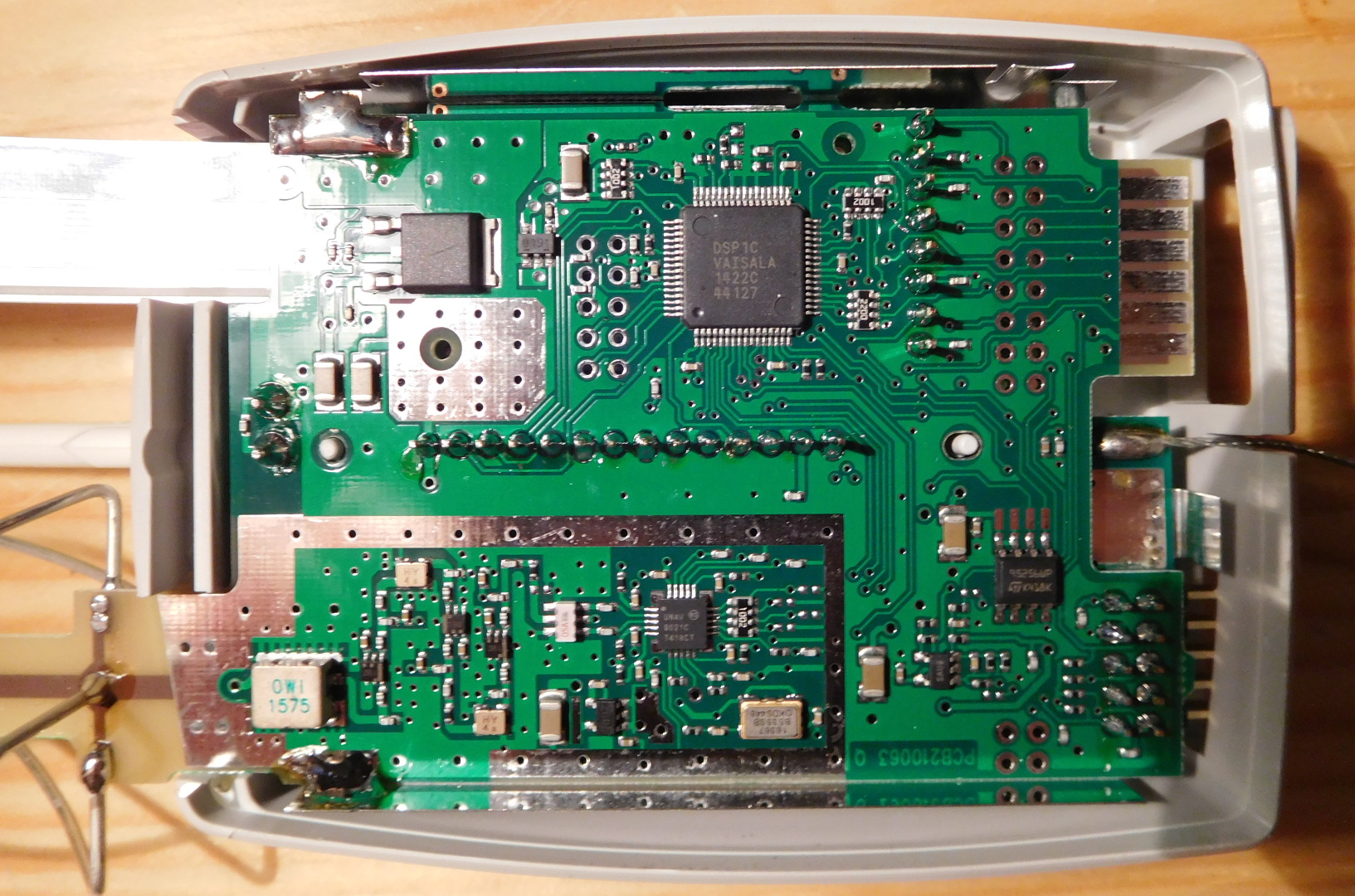
Below, you can see the top of the main PCB. On the lower right there is the GPS section, with provision for a shielding can which is not installed. The GPS chipset used is the uN8021B. This is just a frontend receiver that feeds quadrature data to the main processor. In fact, the unit doesn’t do full GPS decoding, as this is not really necessary. It transmits the time-of-flight data to the ground station, which uses these together with the proper almanac and ephemeris data to compute the position of the radiosonde. Keep in mind that for meteorological sonding the most important function of the GPS is to deduce the wind velocity and direction.
To the right of the GPS section there is a M95256-W 32KB SPI EEPROM. It is used to store the program and configuration. The main processor, which is on the middle top is a custom ASIC. You can find some reversed engineered information about it. Next to the sensor boom there is an LM1117 LDO adjustable regulator. It is set for 3.125V.
There is not much else on the top of the board. The sensors unit and the radio are mounted on the back, but to access the back you have to remove the shielding, which I haven’t done yet. You can see how it looks like in this teardown video.
You can find more reverse engineered information on the brmlab hackerspace web. I think that I’ll try to hack this unit to make it transmit on the 70cm amateur band and use it as a weather station.
Buena caza, quita te interese pasarte por http://dicestudeglobo.com/ para compartir tus experiencias en esta particular aficion.
What I would like to know is where do most radiosondes end up? Is launching or dropping these units contributing to littering of the oceans, forests, etc with plastic and other parts (batteries, string, metals)?
Obviously it depends on the launching location and predominant high altitude winds. For the radiosondes launched at Barajas, many times they tend to drift northeast and land around 100 to 250km away from Madrid. Others land around the Madrid area, when there is not much wind.
Radioclub Madrid is now making a map of all landings: http://sonda.radiomad.es:8080/map/mapAll.php
Regarding the ecological impact, some of the materials are biodegradable and some (the electronics) are not. For radiosondes launched near coastal areas (which tend to land on the sea), special wet batteries are used to avoid water contamination (up to some extent). Other radiosondes use alkaline or lithium batteries.
This might seem a lot of littering, but two radiosondes per day scattered over a huge area is hardly comparable to all the other amount of litter that we throw everywhere.
And in terms of risk/benefit accurate weather forecasts save lives, permit safe air transportation, avalanche prediction, forecasting of electrical demand.. and on and on and on.. a small amount of detritus is a fair “trade” for the benefits gained.
Some countries have a “bounty” on recovered radiosondes. Some of them can be refurbished and re-launched.
I really don’t know what it
Actually does. Found one the other day. On the Tohono OOdham Nation.
Sells Az. Any tell what it does. I take it. It’s not important