In the past, I’ve talked about the RS92-SGP radiosonde launched from Madrid-Barajas. Recently, Barajas has replaced the RS92-SGP with the newer Vaisala RS41-SGP (except for ozone sounding, which is is still done with the RS92). The new radiosondes transmit at 401MHz and are released daily at 11:15 and 23:15 UTC.
In that post, I described about how to receive the position data from the RS92 and plot it in Viking in real time. Since then, a few features such as FEC decoding have been added to the RS decoder software, so I have decided to give this a go again with the newer RS41. This will be a complete walk through, since some people are interested in setting up unattended decoders, perhaps running on a Raspberry Pi.
First we download and compile the decoder as follows.
git clone https://github.com/rs1729/RS cd RS/rs41/ ln -s ../ecc/bch_ecc.c bch_ecc.c gcc rs41ptu.c -O2 -lm -o rs41ptu
Now we set up GPSd to read NMEA data from a pipe, as we did for the RS92:
mkfifo /tmp/gps sudo chmod 666 /tmp/gps sudo gpsd /tmp/gps
Finally, we use SoX to record and filter the FM-demodulated audio and pipe it into the decoder. A Perl script is used to convert the output of the decoder to NMEA, which is piped into GPSd. This Perl script had a bug (it converted incorrectly positions west of Greenwhich and south of the equator), but my bugfix has been already merged into upstream.
rec -t wav -r 48000 - 2>/dev/null | \ sox - -t wav - lowpass 2800 | \ ./rs41ptu --ecc --crc -i | \ ../rs92/pos2nmea.pl > /tmp/gps
You may or may not need to use the -i option with rs41ecc depending on whether your receiver is frequency inverting.
The line above assumes that you use an FM receiver with its audio output connected to the computer’s sound card. It can also be used with any SDR software if you use snd-aloop or pulseaudio to send the audio from the SDR software to rec. A popular alternative is to use an RTL-SDR. In this case, one can use rtl_fm as follows:
rtl_fm -f 401e6 -g 20 -s 48e3 - | \ sox -t s16 -r 48000 -c 1 - -t wav - lowpass 2800 | \ ./rs41ptu --ecc --crc -i | \ ../rs92/pos2nmea.pl > /tmp/gps
Then any program that supports GPSd can be used to plot the position of the radiosonde in real time. For instance, we can use Viking. To start the tracking in Viking, we right click in the list of layers, select New Layer > GPS, then go to the Realtime Tracking Mode tab and click OK.
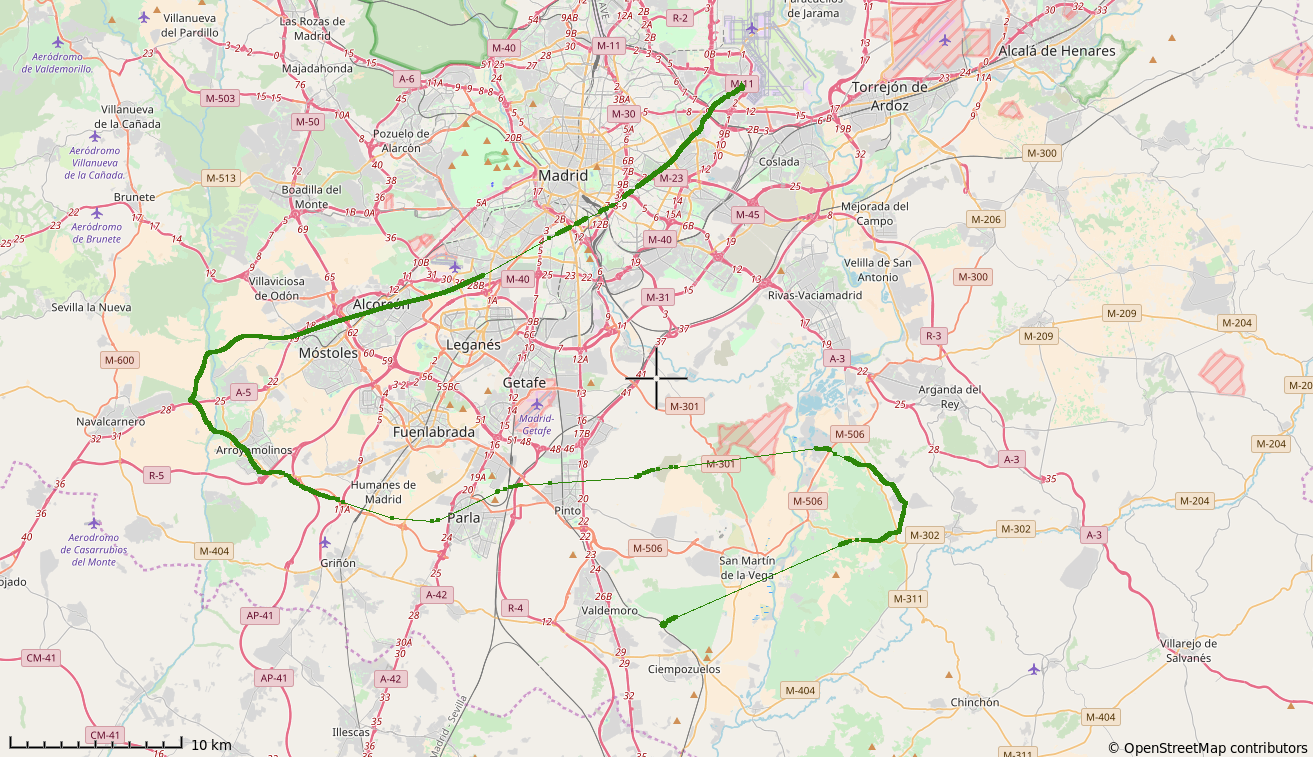
The tracking I have done today is shown below.
Another common activity when tracking radiosondes is to feed the position into the APRS-IS network. To do this, I have made a Perl script that makes APRS packets with the output of the decoder. The packets are then sent to the APRS-IS network using netcat.
The position is reported as an APRS object using the radiosonde callsign as the object’s callsign. This is much better than using APRS position packets, which is what sm2aprs does. For instance, you only get one object in the map even if several people are tracking and reporting the radiosonde at the same time.
The APRS reporter can be run as follows:
rec -t wav -r 48000 - 2>/dev/null | \ sox - -t wav - lowpass 2800 | \ ./rs41ptu --ecc --crc --ptu -i | \ ../rs92/pos2aprs.pl CALLSIGN passcode "Radiosonda AEMET LEMD" | \ nc rotate.aprs2.net 14580 > /dev/null
(You can also use rtl_fm instead of rec). Please replace in the command line above CALLSIGN with your own Amateur radio callsign and passcode with your APRS-IS passcode. You can find your passcode here. Also substitute the comment “Radiosonda AEMET LEMD” by a suitable one if you are tracking a radiosonde other than the ones released from Barajas.
This also reports the temperature of the radiosonde in the APRS comment. The rest of the meteorological variables are not supported by the decoder.
You can view the results of my tests of sending the data to the APRS-IS network here.
Hi Daniel!
Very interesting post, thanks for that! One question: you stated that Barajas station start to use RS41: Do you know if was only this station or all AEMET stations start to use it!?
I discover that this model is easy “hackable” and could be a good basis for some interesting experiments!
Many thanks in advance! 73&DX de Zalo EB1IVY
Hi Zalo, I’m not certain if all AEMET stations are switching to the RS41 right now, but presumably they will all switch eventually, since the RS41 is newer and better in some aspects than the RS92.
The RS41 is a very nice platform for hacking, as it an ST ARM microcontroller, an u-BLOX GPS receiver and a SiLabs FSK transceiver (so it’s similar to the FaradayRF in terms of hardware). In comparison, the RS92 uses custom ASICs and its GPS receiver is not standalone. So catching an RS41 is certainly something I would like to do in the future.
Has the new radiosonde been tested or went to WMO inter – comparison. Are there processes or procedures to register such radiosondes to be used by all.
Hi Syfred, I cannot give you a good answer because I am more concerned with the radiofrequency aspect of the radiosondes rather than the meteorological instrumentation (although I find it interesting, this is not my field, so I lack a lot of knowledge). However you can see some studies, comparisons with the RS92 and reports involving the WMO if you search in Google.
If you find out anything about the frequency aspect let me know . I just dug one out of the tree in my front yard, it was a bullseye . The parachute landed in the neighbors with about 50 yards of string attached.
What do you mean by “frequency aspect”?
Hello, I have an RS-41 and I want to transform it into a weather station in the 70 cm hamradio band, which software I must use to measure temperature, humidity and others. Thank you
Hi, there are a number of alternative firmwares for the RS-41 done by the community. Here is one that contains a list to most of them at the end of the README: https://github.com/mikaelnousiainen/RS41ng
However, I don’t know if any of these processes all the data from the weather sensors that would be required to turn this into a weather station.